Information Technology Reference
In-Depth Information
100
100
Our method
Ansar+Araujo
Ansar
Araujo
80
80
60
60
40
40
Our method
Ansar+Araujo
Ansar
Araujo
20
20
0
0
0
2
4
6
8
0
1
2
3
4
5
6
7
Rotation angle error in degrees
Rotation angle error in degrees
(a)
(b)
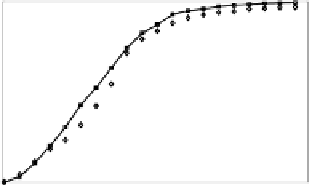
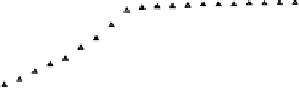
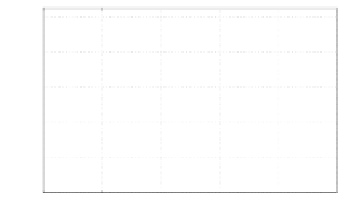
Fig. 13.7
Distribution of θ
e
with respect to noise level and errors on camera parameters:
(a) results with zero noise and exact camera; and (b) results for 0.3 pixels gaussian noise,
principal points coordinates [375 375] and focal
F
= 760
Let us consider the pose error defined by
T
e
=
R
e
t
e
0
1
×
3
1
=
T
−
1
r
T
c
where
T
r
and
T
c
are respectively the real and the estimated pose. If the correct pose
is obtained,
T
e
is equal to the identity matrix (
θ
e
be
the rotation error corresponding to the rotation matrix
R
e
. Figures 13.7 and 13.8
give the distribution of
t
e
= 0and
R
e
=
I
3
). Let
using the four different methods and for three
different levels of noise. In other words, for each values of
θ
e
and
t
e
θ
e
and
t
e
, the plot
gives the percentage of the errors smaller or equal to these values.
Figures 13.7(a) and 13.8(a) give the distributions of
when perfect
data is considered (without noise and using the exact camera parameters). From
these figures, it can be seen that the linear method, our method and
AA
method
have always estimated the exact pose. On the other hand, Araujo's method initial-
ized by the identity matrix only converges for nearly 40% cases. Figures 13.7(b) and
θ
e
and
t
e
100
100
80
Our method
Ansar+Araujo
Ansar
Araujo
80
60
60
40
40
Our method
Ansar+Araujo
Ansar
Araujo
20
20
0
0
0
0.05
0.1
0.15
0.2
0.25
0
0.05
0.1
0.15
0.2
0.25
Error on translational motion in meter
Error on translational motion in meter
(a)
(b)
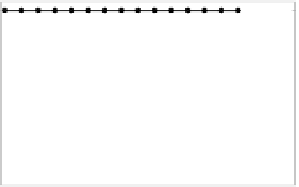
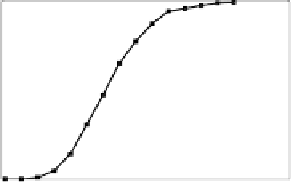
Fig. 13.8
Distribution of
t
e
with respect to noise level and errors on camera parameters:
(a) results with zero noise; and (b) results for 0.3 pixels gaussian noise, principal points
coordinates [375 375] and focal
F
= 760































































Search WWH ::

Custom Search