Information Technology Reference
In-Depth Information
v
X
[π]
X
[π]
Π
Π
u
[π]
d
n
π
X
X
v
d
π
u
u
c
c
(a)
(b)
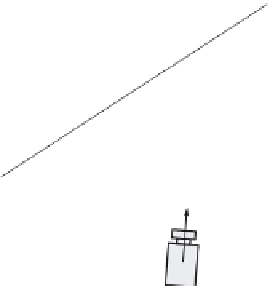
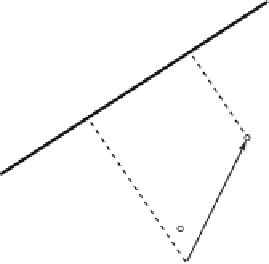
and the virtual point
X
[π]
; and (b) the
Fig. 1.2
(a) Reflection through the planar mirror
Π
virtual camera
v
X
with
u
=
K
[
I0
]
D
[π]
+
λ
λ
∈
R
(1.1)
where
K
is the calibration matrix of the camera and
D
[π]
is the
reflection transfor-
mation
about the mirror
n
π
, defined as
S
[π]
2
d
π
n
π
D
[π]
=
(1.2)
0
T
1
where
S
[π]
=
I
2
n
π
n
T
−
.
π
Proof.
The perspective projection
u
of the virtual point
X
[π]
is given by
u
=
K
[
I0
]
X
[π]
λ
.
(1.3)
From geometrical considerations in Figure 1.2(a), we see that
X
[π]
=
X
+ 2
d
n
π
.
(1.4)
X
T
n
π
, then (1.4) can be rewritten as
Since
d
=
d
π
−
X
[π]
=(
I
2
n
π
n
T
−
)
X
+ 2
d
π
n
π
.
(1.5)
π
By introducing the matrix
D
[π]
defined in (1.2), (1.5) becomes
X
[π]
=
D
[π]
X
.
(1.6)



























Search WWH ::

Custom Search