Information Technology Reference
In-Depth Information
3
0.4
2.5
0.2
2
0
1.5
1
−0.2
0.5
−0.4
0
−0.6
10
20
30
40
50
60
70
80
0
20
40
60
80
100
Iterations
Iterations
(a)
(d)
0.15
0.5
0.4
0.1
0.3
0.05
0.2
0
0.1
−0.05
0
−0.1
−0.1
−0.2
10
20
30
40
50
60
70
80
0
20
40
60
80
100
Iterations
Iterations
(b)
(e)
10
10
8
5
6
0
4
−5
2
−10
0
−15
−2
10
20
30
40
50
60
70
80
0
20
40
60
80
100
Iterations
Iterations
(c)
(f)
1
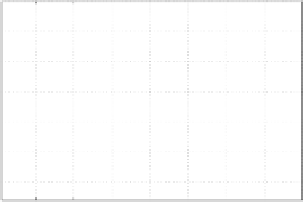
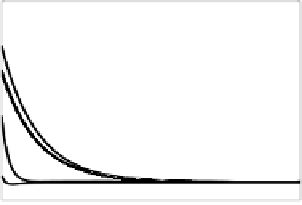
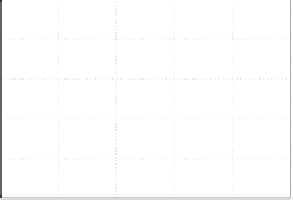
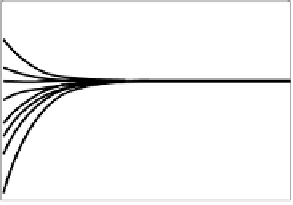
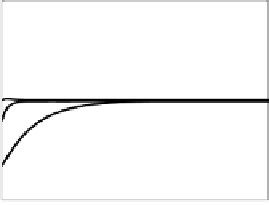
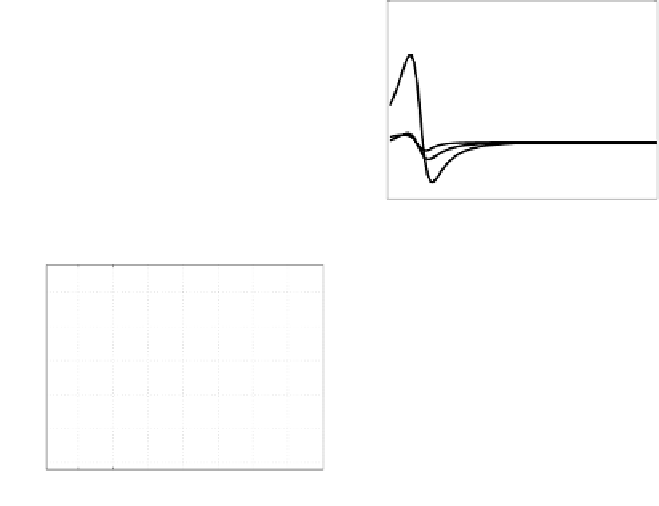
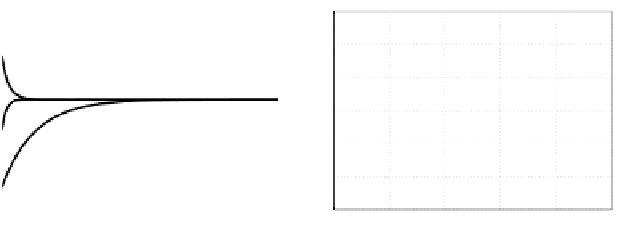
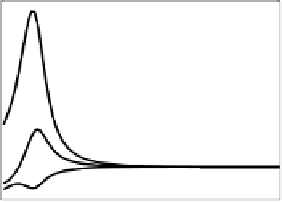
Fig. 13.6
Results for general motion. Using
I
t
=
√
I
1
: (a) features errors; (b) translational
velocities (in m/s); (c) rotational velocities (in deg/s). Using point coordinates: (d) features
errors; (e) translational velocities (in m/s); and (f) rotational velocities (in deg/s)
random numbers chosen from a normal distribution with mean zero, variance
one and standard deviation one,
σ
3
is a random number chosen from a uniform
distribution on the interval [0
.
01
.
0];and
-
the rotational motion is chosen such that the points coordinates belongs to the
image limits [1 800; 1 800]. Further, the rotational motion with respect to the
optical axis can range randomly between [02
π
].








































































Search WWH ::

Custom Search