Information Technology Reference
In-Depth Information
0.5
3
2.5
2
0
1.5
1
−0.5
0.5
0
−1
10
20
30
40
50
60
70
80
0
20
40
60
80
100
Iterations
Iterations
(a)
(d)
0.15
0.3
0.1
0.2
0.05
0.1
0
0
−0.05
−0.1
−0.1
−0.2
10
20
30
40
50
60
70
80
0
20
40
60
80
100
Iterations
Iterations
(b)
(e)
15
10
10
5
0
5
−5
0
−10
−15
−5
10
20
30
40
50
60
70
80
0
20
40
60
80
100
Iterations
Iterations
(c)
(f)
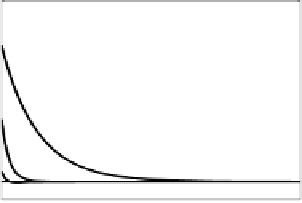
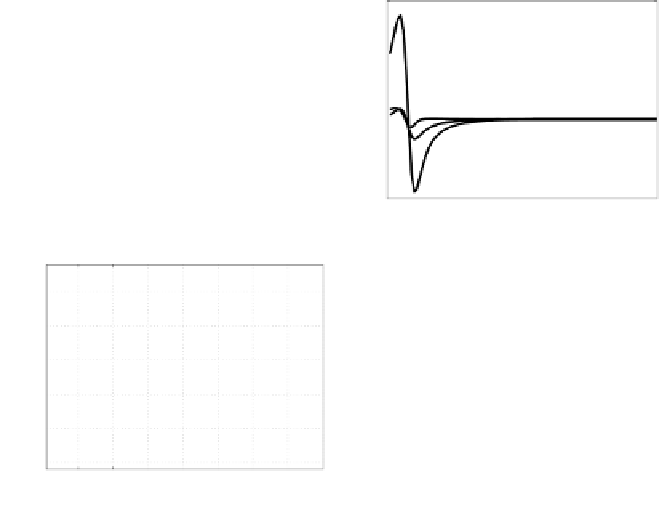
Fig. 13.5
Results for pure rotational motion. Using
S
I
=
1
√
I
1
: (a) features errors; (b) trans-
lational velocities (in m/s); (c) rotational velocities (in deg/s). Using point coordinates: (d)
features errors; (e) Translational velocities (in m/s); and (f) rotational velocities (in deg/s)
•
a camera model with focal
F
= 800 and principal point coordinates
u
=
v
= 400
pixels has been used to compute the points coordinates in image;
•
the interaction matrix corresponding to the current position is used in the control
law (13.4) to compute the camera displacement (
i.e.
L
s
=
L
s
); and
•
random poses have been generated as follow:
-
1000 random translational motions
t
=(1
σ
3
) are firstly applied
to the point coordinates defined in the square frame, where
σ
1
1
σ
2
1
.
3
σ
1
and
σ
2
are






































































Search WWH ::

Custom Search