Information Technology Reference
In-Depth Information
13.5.1
Variation of the Interaction Matrix with respect to Depth
Distribution
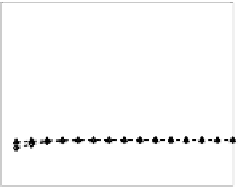
Figure 13.3 gives the variations of the interaction matrix entries of
I
1
and
s
I
=
1
√
I
1
with respect to translational motion applied along the optical axis to the four random
coplanar points defined in the camera frame as
⎛
⎞
−
0
.
3258
−
0
.
0811
0
.
1487
0
.
2583
⎝
⎠
.
−
0
.
0458
0
.
1470
−
0
.
1052 0
.
0039
X
o
=
(13.26)
1
.
0000
1
.
0000
1
.
0000
1
.
0000
The set of points has been chosen to be approximatively centered with respect to the
z
−
axis
(
m
100
≈
0
m
010
≈
0). For this reason, it can be seen that
L
x
≈
L
x
1
≈
L
y
≈
L
y
1
≈
0] ). In practice,
the features
I
1
and
s
I
also depend mainly on the translational motion with respect
to the object axis of view. From Figures 13.3(a-b), it can be seen that
L
z
1
is almost
constant and largely invariant to the object depth. On the other hand
L
z
decreases to
0 when the object depth increases.
0(
L
I
1
=[
L
x
,
L
y
,
L
z
,
0
,
0
,
0] and
L
s
I
=[
L
x
1
,
L
y
1
,
L
z
1
,
0
,
0
,
1.5
0.2
L
x
L
y
L
z
0
1
−0.2
L
x
1
L
y
1
L
z
1
−0.4
0.5
−0.6
−0.8
0
−1
−0.5
−1.2
0
1
2
3
0
0.5
1
1.5
2
2.5
3
(a)
(b)
Fig. 13.3
Variations of the interaction matrix with respect to depth distribution (in meter):
(a) results for
I
1
; and (b) results for
s
I
=
1
√
I
1
13.5.2
Visual Servoing Results
In these simulations, the set of points is composed of 4 noncoplanar points. For all
the following simulations, the desired position corresponds to the 3D points coordi-
nates defined in the camera frame as
⎛
⎞
0
−
0
.
200
.
2
⎝
⎠
.
X
d
=
0
.
20
−
0
.
20
(13.27)
0
.
91
11
.
2
From the four set of points 4 different triangles can be obtained. For each triangle,
the invariant
s
I
=
1
√
I
1
is computed to control the translational motion.







































Search WWH ::

Custom Search