Information Technology Reference
In-Depth Information
D(s)
P(
s
)
R
(
z
)
Y(s)
T
s
E(z)
U(z)
α
(s)
+
K(
z
)
G(
s
)
ZOH
+
+
-
V(z)
z
−
1
C
m
(
z
)
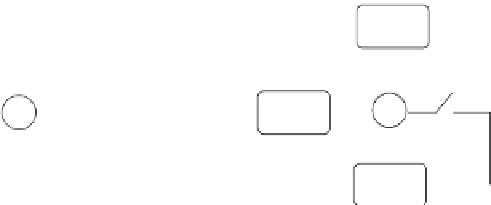
Delay due to the image
processing
Fig. 6.15
Heart immobilization: a block diagram of the controlled plant
6.5.2.2
Control Strategy:
H
∞
Controller
A feedback control law is designed in order to reject the perturbations due to the
heart motion,
i.e.
to keep the stabilizer end effector in a steady position. The control
synthesis scheme is given in Figure 6.16.
G
c
represents the bilinear transform of
H
,and
P
c
the bilinear transform of the transfer between the heart force and the
visual measurement. The synthesis scheme relies on three weighting functions
W
1
,
W
2
and
W
3
. The controller
K
(
s
) is designed [15] in order to stabilize the closed
loop and minimize the
H
∞
norm of the performance channel (the transfer between
w
=[
w
1
,
w
2
] and
z
=[
z
1
,
z
2
]). Denoting
γ
the obtained performance index, we obtain
the inequalities
W
−
1
(
j
|
T
er
(
j
ω
)
| <
γ
|
ω
)
|
W
−
3
(
j
|
T
ur
(
j
ω
)
| <
γ
|
ω
)
|
(6.24)
W
−
1
(
j
)
W
−
1
2
|
T
ed
(
j
ω
)
| <
γ
|
ω
(
j
ω
)
|
W
−
3
(
j
)
W
−
1
2
|
T
ud
(
j
ω
)
| <
γ
|
ω
(
j
ω
)
|.
The second terms of these inequalities are considered as templates for the transfer
function of the left-hand side terms and have to be tuned according to the control
objectives. Therefore
W
1
,
W
2
and
W
3
have to be chosen according to the control
objectives.
W
1
is used to set the required modulus margin in order to guarantee a
good robustness with respect to the model uncertainties.
W
3
is chosen such that the
controller gain decreases in the high frequencies in order to be robust with respect to
the system unmodeled dynamics.
W
2
is set to limit the gain of
T
ed
in the frequency
range of interest,
i.e.
where the frequency content of the cardiac perturbation lies.
6.5.2.3
In vivo
Results
Figure 6.17 reports the results of an
in vivo
stabilization test. The controller was
switched on 6 s after the beginning of the experiment. The peak to peak heart excur-
sion was then divided by 4. The RMS of the residual motion is 0.37 mm and 0.03
mm, respectively before and after the activation of the controller.












Search WWH ::

Custom Search