Information Technology Reference
In-Depth Information
The visual measurement variation is due to the heart motion and also to the robot
displacements. Thanks to the eye-to-hand configuration of the system, one can eas-
ily extract the heart motion
S
d
from the visual measurement. As explained in Section
6.3, the future heart motion at sample time
k
+
j
can be predicted. By modifying the
reference of the visual loop (Figure 6.12) as
r
m
(
k
+
j
)=
r
(
k
+
j
)
−
(
S
d
(
k
+
j
)
−
S
d
(
k
))
,
(6.22)
the GPC controller can anticipate the future heart motion disturbance yielding a
smaller tracking error. A GPC controller with a reference modification is called
GPC with adaptive predictor (GPC+A).
6.5.1.3
In vivo
Results
The control strategy of the robotic tracking of the heart motion was validated during
in vivo
experiments on pigs (Figure 6.13) which underwent full sternotomy after re-
ceiving general anesthesia. During the experiments, markers are sticked on the heart
surface. The control strategy was validated using a simple GPC (without modifying
the reference) and then with the GPC+A (with the modification of the reference).
The results show a reduction of 80% of the disturbance with the standard GPC. Re-
ductions of 93% and 84% are obtained respectively for
Δ
y
when GPC+A is
used. These results demonstrate the validity of the approach. Figure 6.14 shows the
residual error along
Δ
x
and
Δ
y
.
160
Heart motion
Predicted heart motion
140
120
100
80
60
40
20
0
−20
−40
0
2
4
6
8
10
12
14
16
Time (s)
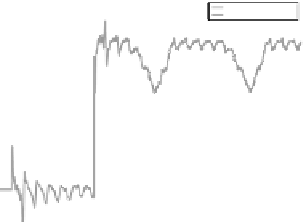
Fig. 6.13
On the left, a picture of an
in vivo
heart-tool synchronization experiment. On the
right, the achieved prediction of future heart motion
6.5.2
Heart Immobilization
In this approach, an active stabilizer is controlled to cancel any displacement of
the area of interest, while the surgeon is performing the suturing gesture with a
telemanipulated robot. We put here the focus on the control of the active stabilizer.






















Search WWH ::

Custom Search