Information Technology Reference
In-Depth Information
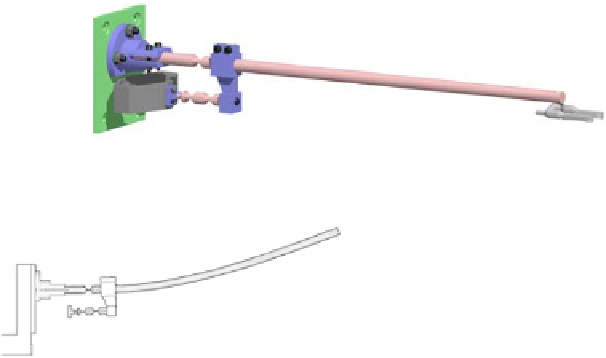
Fig. 6.2
CAD view of the first prototype of Cardiolock
Fig. 6.3
Active compensation principle
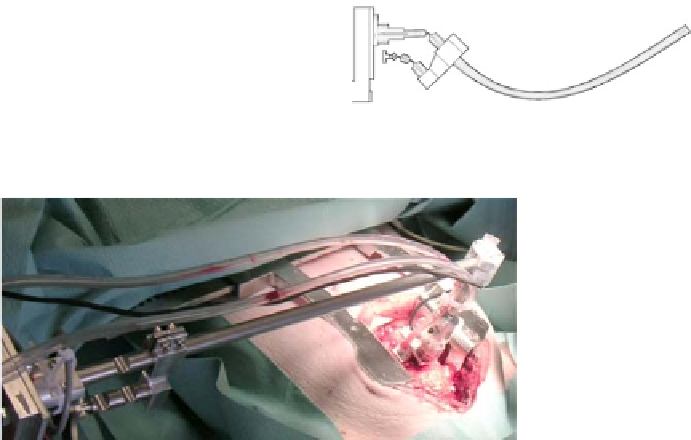
Fig. 6.4
Cardiolock
em vivo
experiments on pig
mechanism, which remains outside the patient body. The other part is a stainless
steel beam which dimensions are compatible with MIS and that can be simply
locked on the first part.
The asepsy of the device can be easily ensured: the external subsystem can be
wrapped in a sterile bag and the other part can be sterilized using an autoclave.
In Figure 6.3 the principle of the device is introduced with a decomposition of
the compensation task for illustration purpose. The left part shows the magnified
deflection of the stabilizer due to the cardiac force; the stabilizer tip displacement is
measured with vision. The right part shows the cancelation of the tip displacement
by the modification of the closed-loop mechanism geometry.
One may notice that the approach developed in the Cardiolock project is quite
similar to the one adopted in the MiCRoN project [11] for retinal surgery. This de-
vice is designed to compensate for the surgeon tremor. Only small displacements are
achievable, with high dynamics. If we consider the classification introduced in [14],
Search WWH ::

Custom Search