Information Technology Reference
In-Depth Information
GN
MLM
4e+08
t
z
(m)
t
z
(m)
GN
MLM
3e+08
0
-0.025
2e+08
-0.05
0
1e+08
-0.1
-0.05
t
y
(m)
0
-0.2
0.05
0
t
x
(m)
0
10
20
30
40
50
(a)
(b)
100
100
50
50
0
0
-50
-50
t
t
t
z
-100
t
t
t
z
-100
-150
-150
-200
-200
-250
-250
-300
0
10
20
30
40
50
0
10
20
30
40
50
(c)
(d)
4
3
0
0
-3
-4
-6
u
θ
x
u
-9
-8
u
θ
x
θ
y
u
u
θ
y
θ
z
-12
u
θ
z
-12
-15
-16
-18
0
10
20
30
40
50
0
10
20
30
40
50
(e)
(f)
(g)
(h)
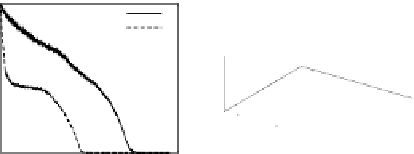
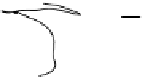
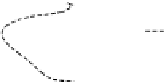
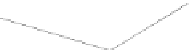
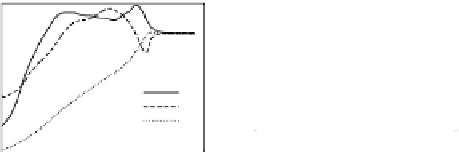
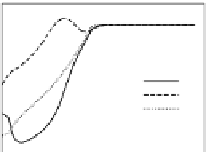
Fig. 5.3
First experiment, MLM versus GN method (
x
axis in seconds): (a) comparison of
cost functions; (b) comparison of camera trajectories; (c) translation error for the GN method
(in mm); (d) translation error for the MLM method (in mm); (e) rotation error for the GN
method (in deg); (f) rotation error for the MLM method (in deg); (g) initial image; and (h)
final image
-0.02 deg, 0.03 deg). It is very difficult to reach so low positioning errors when
using geometric visual features as it is usually done. Indeed, these nice results are
obtained because
I
I
∗
is very sensitive to the pose
r
.
−
















































































Search WWH ::

Custom Search