Geoscience Reference
In-Depth Information
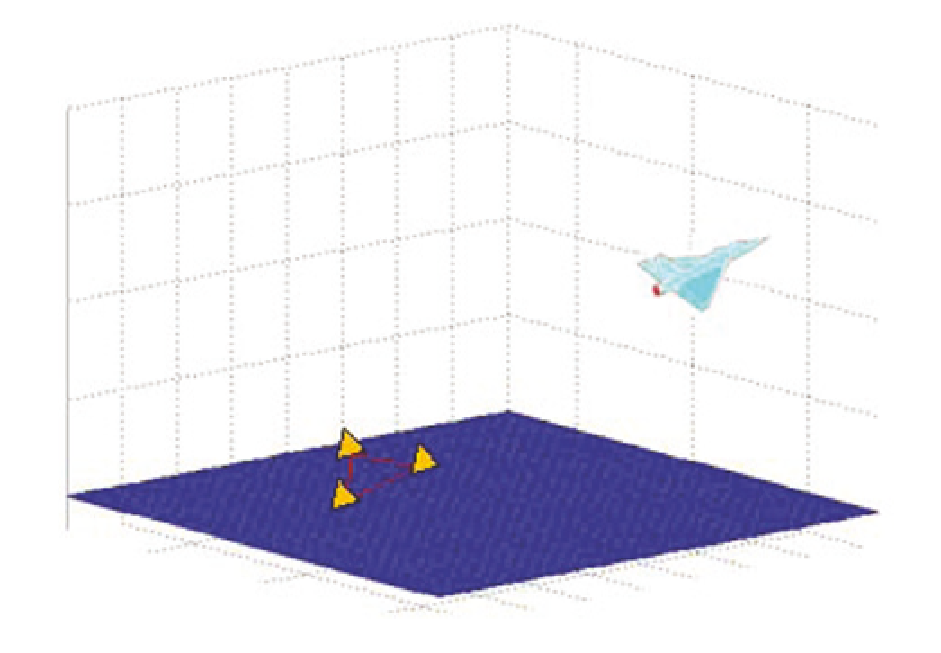
Fig. 2. The arrangement of the three sensors and their positions relative to the target
which
C
e
is the velocity of the emitted signal that is equal to the light speed. For two other
receivers that are not near the transmitter, the distance is calculated as:
T
1
2
R
i
=(
T
i
−
)
×
C
e
,
i
=
2, 3.
(26)
Each sensor provides the locus of the target on a sphere of radius
R
i
centered at that sensor.
As mentioned before, these sensors are located on the vertices of an equilateral triangle.
It can be shown mathematically that the intersection of these three spheres is at two points.
To prove this, the equations for the three spheres are considered, and then the intersection
of them is obtained. Without losing the generality, we assume that the three points where
the sensors are located in, are showed by A, B and C. The points are respectively in
(
x
0
,0,0
)
,
(
−
x
0
,0,0
)
and
(
0,
y
0
,0
)
in Cartesian coordinates and are showed in figure (3).
At first, the equations of two spheres with centers A and B and radii
R
1
and
R
2
are obtained:
(
2
y
2
z
2
R
1
,
−
x
0
)
+
+
=
x
2
y
2
z
2
R
2
.
(
x
+
x
0
)
+
+
=
(27)
The first equation is subtracted from the second one:
R
2
−
R
1
−
(
−
) =
⇒
2
xx
0
2
xx
0
R
2
−
R
1
R
2
−
R
1
4
xx
0
=
⇒
=
x
.
(28)
4
x
0