Information Technology Reference
In-Depth Information
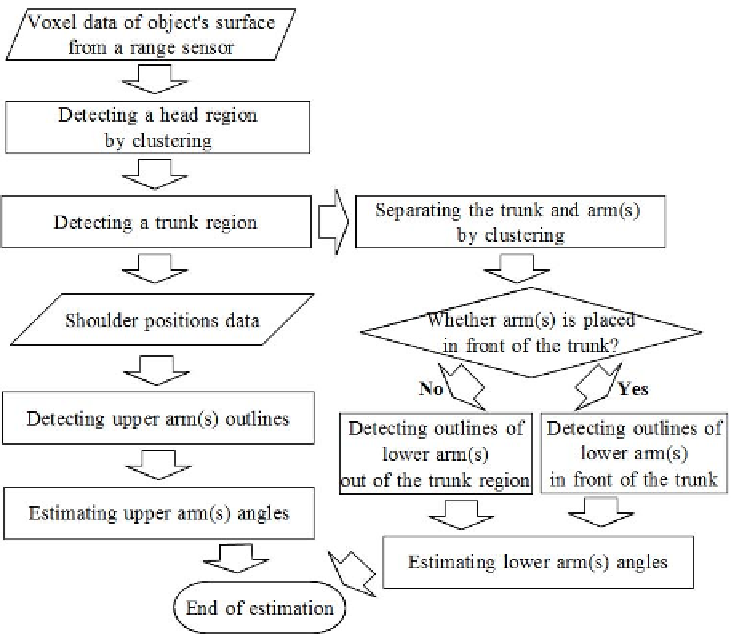
Fig. 4.
The overview of the estimation of arm angles
The overview of the estimation process is shown in Figure 4. The input of
the estimation process is voxel data of object's surface. In the first step, the
horizontal widths of scattered parts of the measured object are used as the
input features for a clustering technique to segment into head region and body
region. In the next step, a trunk region is detected on the basis of structure of the
body. From the third step, the estimation process diverges into two; estimation
of upper arm angles and lower arm angles.
In the upper arms estimation, shoulder positions are firstly estimated from
the trunk region on the basis of structure of the body. Secondly, the outline of
the upper arms is detected by searching voxel data from the shoulder positions
to the outside of the trunk. Finally, detected voxels of the upper arm outlines
are used as the input features for a straight-line approximation of upper arm
angles.
In the lower arms estimation, the distance of the voxel data is firstly used
as the input features for a supervised clustering technique to segment into the
trunk and the arms in the trunk region. When either arm is placed in front of
the trunk, the outline of lower arms is detected by searching voxel data of the