Information Technology Reference
In-Depth Information
9.3.2 Predictions of the Basic PRP and the Practice Effect on PRP
with the Queuing Network Model
Based on Equation (9.7) and Lemmas 9.1 and 9.2, we can predict the simulation
results of the basic PRP effect and the PRP practice effect. For the entities in task 2
(see Fig. 9.5), at the beginning of the practice phrase, because the visual-motor map-
pings are not established in PM [32], PM takes a longer time to process the entities
than the CE and the Hicog servers. Thus, the
Q
value from Visk to PM (
Q
(
1
,
3
)
)
is lower than the
Q
value from Visk to CE (
Q
). According to Lemma 9.1, the
majority of the entities will go to the CE and Hicog server at the beginning of the
learning process in dual tasks. Consequently, entities from task 1 also go through the
CE and Hicog server thus producing a bottleneck at the Hicog server which produces
the basic PRP effect. This bottleneck is similar in theory to that of Pashler [34].
During the learning process, the CE will send entities which increase the process-
ing speed of PM based on the parallel learning mechanisms between the visual loop
(including CE) and the motor loop (including PM) ( [33], see Table 9.1). Therefore,
when the
Q
value of the 2P and P route of task 2 increases, an increasing number
of entities of task 2 will travel on the 2nd route and form an automatic process,
which creates two parallel routes that could be traversed in this dual-task situation.
However, because the learning rate of PM server (1/16,000) is lower than that of the
Hicog server for the entities in task 2 (1/4,000), the majority of the entities will still
go through the Hicog server.
(
1
,
2
)
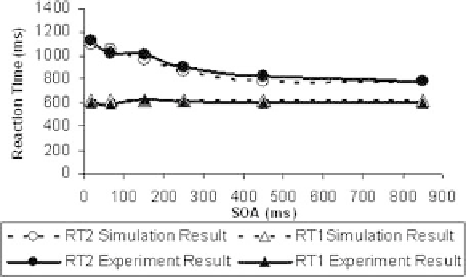
9.3.3 Simulation Results
Figure 9.7 shows the simulation results of the basic PRP effect compared to
the empirical results. The linear regression function relating the simulation and
Fig. 9.7: Comparison of simulation and experiment results at the beginning of
practice (basic PRP effect).