Information Technology Reference
In-Depth Information
0.8
p
t
0.6
0.4
0.2
0
0
2
3
10
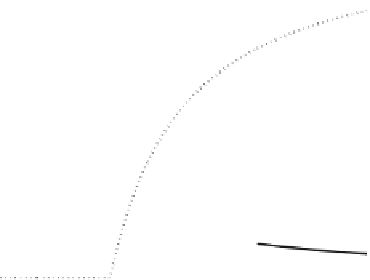
Fig. 15.2
Optimal values of
p
and
t
for various values of
ν
in the stationary predator, hidden prey
game. Other parameters are
λ
=
1,
α
=
0
.
5,
γ
=
0,
β
=
0
.
5
Thus for different values of search efficiency
ν
we have:
ν
small: the prey does not move and the predator gives up immediately (e.g. the
cover is too dense, opportunities are better elsewhere than here).
ν
medium: the predator will search for some time before leaving, but the prey will
never run if not found.
ν
large: the predator will search for some time before leaving, and the prey will
play a mixed strategy, fleeing immediately with some probability, and otherwise
never running unless attacked.
15.5 Discussion
Initially we looked at existing models of two situations where prey must decide
whether to flee. Sometimes elements of both models will be present. Although the
cost of fleeing considered by Broom and Ruxton [
2
], energetic costs and risk of
capture, and that considered by Ydenberg and Dill [
14
] and Cooper and Frederick
[
3
], loss of foraging time, are not mutually exclusive, we can make predictions about
the relative importance of the two costs.
In cases where predators can see prey from a distance then the Cooper and Fred-
erick [
3
] model is better. An example is an adult zebra or gazelle grazing on the
savannah during the day, see [
13
]. This is particularly true if attempted predation is
common, so that costs of flight are significant to the daily energy or time budget of
the prey, or if fleeing causes the prey to lose a valuable food item (e.g. a cheetah
being driven from a kill by approaching lions). There are many instances of prey
not fleeing as soon as a predator is seen; for example [
14
] gives a number of situ-
ations where flight distance is affected by the speed of a predator's approach, and
many prey become alert when a cheetah is spotted, but do not take flight until it is

























Search WWH ::

Custom Search