Information Technology Reference
In-Depth Information
dark regions of facial images, such as the eyes and the shadow of the nose. The
figure also shows the encoding
h
of a face and its reconstruction. Because both the
weights and the coefficients of
h
contain a large number of vanishing components,
the encoding is sparse. The reason for this is that the model is only allowed to add
positively weighted non-negative basis-vectors to the reconstruction. Thus, different
contributions do not cancel out, as for instance in principal components analysis.
Although the generative model is linear, inference of the hidden representation
h
from an image
v
is highly non-linear. The reason for this is the non-negativity
constraint. It is not clear how the best hidden representation could be computed
directly from
W
and
v
. However, as seen above,
h
can be computed by a simple
iterative scheme. Because learning of weights should occur on a much slower time-
scale than this inference,
W
can be regarded as constant. Then only the update-
equations for
H
remain. When minimizing
k
v
−
Wh
k
2
,
h
is sent in the top-down
direction through
W. Wh
has dimension
n
and is passed in the bottom-up direction
through
W
T
. The resulting vector
W
T
Wh
has the same number
r
of components
as
h
. It is compared to
W
T
v
, which is the image
v
passed in the bottom-up direction
through
W
T
.
The comparison is done by element-wise division yielding a vector of
ones if the reconstruction is perfect:
v
=
Wh.
In this case,
h
is not changed.
When minimizing
D
(
v
k
Wh
)
, the similarity of
v
and its top-down reconstruc-
tion
Wh
is measured in the bottom-layer of the network by element-wise division
v
i
/
(
Wh
)
i
. The
n
-dimensional similarity-vector is passed in the bottom-up direc-
tion through
W
T
, yielding a vector of dimension
r
. Its components are scaled down
with the element-wise inverse of the vector of ones passed through
W
T
to make the
update factors for
h
unity if the reconstruction is perfect.
This scheme of expanding the hidden representation to the visible layer, mea-
suring differences to the observations in the visible layer, contracting the deviations
to the hidden layer, and updating the estimate resembles the operation of a Kalman
filter [116]. The difference is that in a Kalman filter deviations are measured as
differences and update is additive, while in the non-negative matrix factorization
deviations are measured with quotients and updates are multiplicative. Because the
optimized function is convex for a fixed
W
, the iterative algorithm is guaranteed to
find the optimal solution.
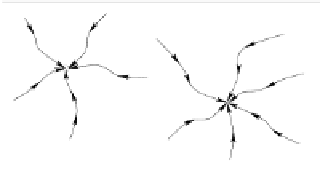
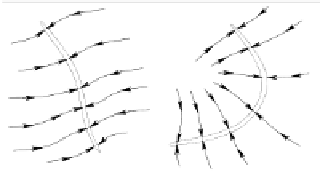
Learning Continuous Attractors.
In most models of associative memories, pat-
terns are stored as attractive fixed points at discrete locations in state space, as
(a)
(b)
Fig. 3.17.
Representing objects by attractors: (a) discrete attractors represent isolated patterns;
(b) continuous attractors represent pattern manifolds (images after [209]).
Search WWH ::

Custom Search