Information Technology Reference
In-Depth Information
temporally asymmetric Mexican hat shaped lateral interactions. Stable solutions
were traveling pulses that followed a motion sequence. The lateral dynamics was
used to integrate activity over time. Vijayakumar
et al.
[234] used neural fields as
saliency map to control attention and to generate saccadic eye movements for a
humanoid robot.
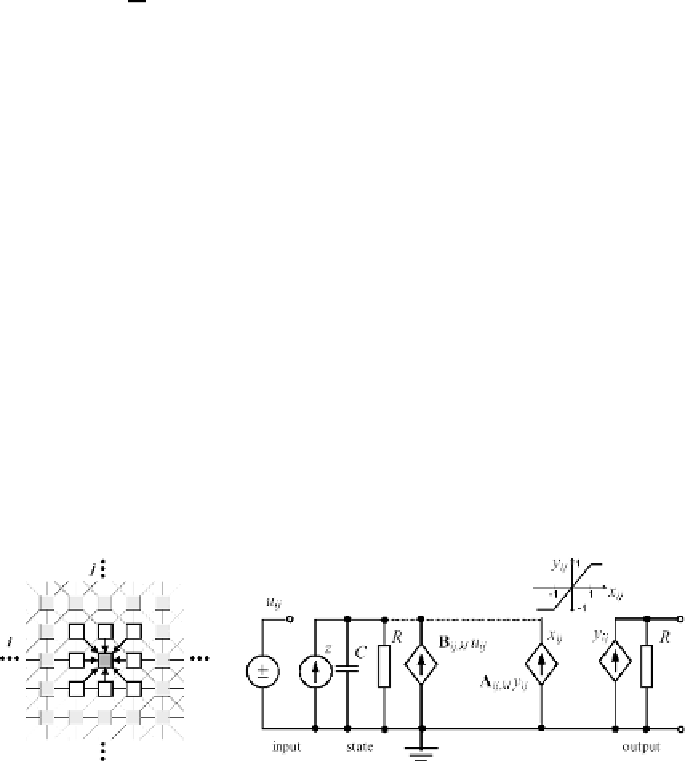
Cellular Neural Networks.
While continuous neural fields facilitate analysis, they
must be discretized to be applicable in practice. Chua and Roska [41, 42] proposed
a simplified model that represents space with discrete cells, the cellular neural net-
work (CNN). This network has a strictly local connectivity. A cell communicates
e.g. to the cells within its 8-neighborhood. The space-invariant weights are described
by templates. A cell is computed as follows:
dt
(
t
) =
−
1
C
dx
ij
R
x
ij
(
t
) +
A
ij,kl
y
kl
(
t
) +
B
ij,kl
u
kl
(
t
) +
z
;
y
kl
,u
kl
∈
N
(
ij
)
,
where
A
describes the influence of neighboring cells,
B
is the receptive field on the
input
u
, and
C
and
R
determine the time-constant of a cell. Parameter
z
determines
the resting potential. The output
y
ij
=
σ
(
x
ij
)
of a cell is a non-linear function
σ
of its state
x
ij
. Frequently, a piecewise linear function that saturates at
−
1
and
1
is
used. While above equation is used for continuous time, there are also discrete-time
CNN variants.
The actual computation of the continuous network dynamics is done by relax-
ation within a resistor-capacity network. It is supplemented with logic operations
and analog image memories in a universal CNN machine, used for image process-
ing purposes. Low-level image processing operations, such as spatiotemporal filters,
thresholding, and morphologic operations, have been implemented in this frame-
work.
The CNN cells can also be combined with photosensors to avoid I/O bottle-
necks. Analog VLSI implementations for focal plane processing up to a size of
128
×
128 [143] have already been realized. The massively parallel architecture
achieves a throughput that would require a supercomputer if the same operations
were realized with general-purpose CPUs.
The CNN approach has been applied to areas other than image processing. For
instance, it has been used for the control of a walking hexapode robot [9] with 18
(a) (b)
Fig. 3.14.
Cellular neural network model of Chua and Roska [41, 42]: (a) processing elements
are arranged in a grid and connected locally; (b) core cell of continuous time analog CNN.

Search WWH ::

Custom Search