Database Reference
In-Depth Information
120
100
80
60
True Signal
40
20
Filtered
Estimate
0
Smoothed
Estimate
í20
í40
í60
Observations
í80
0
2
4
6
8
10
12
14
16
18
20
Time
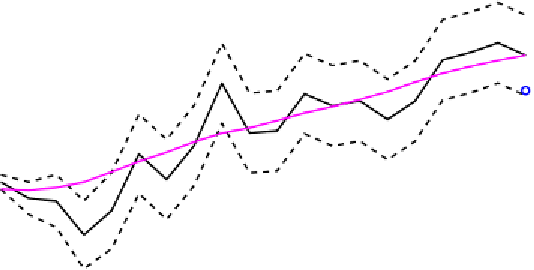
Figure 10.9.
An example output of the Kalman filtering and smoothing estimates
given a set of noisy observations.
tractable and approximate techniques must be utilized. In the case
of non-linear movement, two extensions to the KFM have been intro-
duced which provide local approximations of non-linear movement while
(nearly) maintaining the simple filtering update equations. The Ex-
tended Kalman Filter (EKF) locally linearizes the state estimation, us-
ing partial derivatives of the model dynamics and measurements to ap-
proximate updates. Similarly, the Unscented Kalman Filter (UKF) [38]
attempts to maintain the ecient update equations of the KFM in the
case of non-linear system dynamics by applying the unscented transform,
a deterministic sampling technique, to propagate the state distribution
through the non-linear dynamics before recovering the parameters of the
normal distribution.
Although these approximations provide the convenience of the sim-
ple KFM update equations, they typically fail when the dynamics or
observation errors result in multi-modal distributions [3]. This is due
to the fact that both the EKF and UKF both represent the posterior
distribution over
x
t
as a Gaussian. To represent more complicated densi-
ties, a different representation scheme is required as well as approximate
inference methods. One of the most popular methods for approximate
inference for non-linear dynamics is known as particle filtering [19, 20, 3,
26, 10, 13]. Particle filtering is a generic framework for computing infer-
ence in dynamic models in which no special structure exists. The main
idea is to represent the probability density function (pdf) describing our
belief state of the world as a finite set of weighted point masses. Each