Database Reference
In-Depth Information
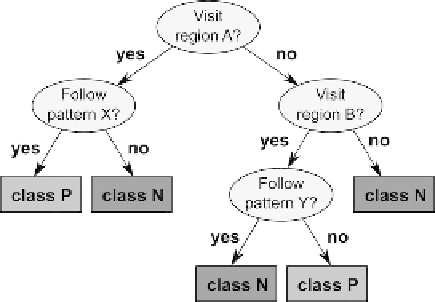
Figure 6.8 Sample decision tree on regions and patterns.
of trajectories identifiable, and the two types of patterns collaborate to better
characterize trajectories.
Once a vector of features has been computed for each trajectory, we can
choose any generic, vector-based classification algorithm. One representative
(and easy to grasp) example is
decision trees
. The resulting classification model
has the structure of a tree, whose internal nodes represent tests on the features
of the object to classify, and the leaves indicate the class to associate to the
objects. Figure
6.8
shows a fictitious example based on TraClass features, with
two classes: positive (P) and negative (N). When a new trajectory needs to be
classified, the test on the root (the top circle) is performed on it. In the example,
if the trajectory actually visits region A, then we move to the left child of the root
and continue the evaluation from there, otherwise we move to the right child.
In the first case, we have now to test whether the trajectory follows pattern X:
in case of a positive answer, the trajectory is labeled with “class P,” otherwise
with “class N.” The classification process proceeds in a similar way when
different outcomes are obtained, always starting from the root and descending
through a path till a leaf is reached, which provides the label prediction. Another
way to read a decision tree is as a set of decision rules, one for each path
from root to leaf, such as “If (Visit region A) AND (Follow patter X) THEN
Class P.”
6.3.3 Trajectory Location Prediction
Trajectory classification can be seen as the problem of predicting a categorical
variable related to a trajectory. However, prediction is most naturally related
to the temporal evolution of variables. Since the basic aspect of objects in the
context of trajectory is their location, predicting their future position appears to
be a problem of primary interest.