Database Reference
In-Depth Information
t
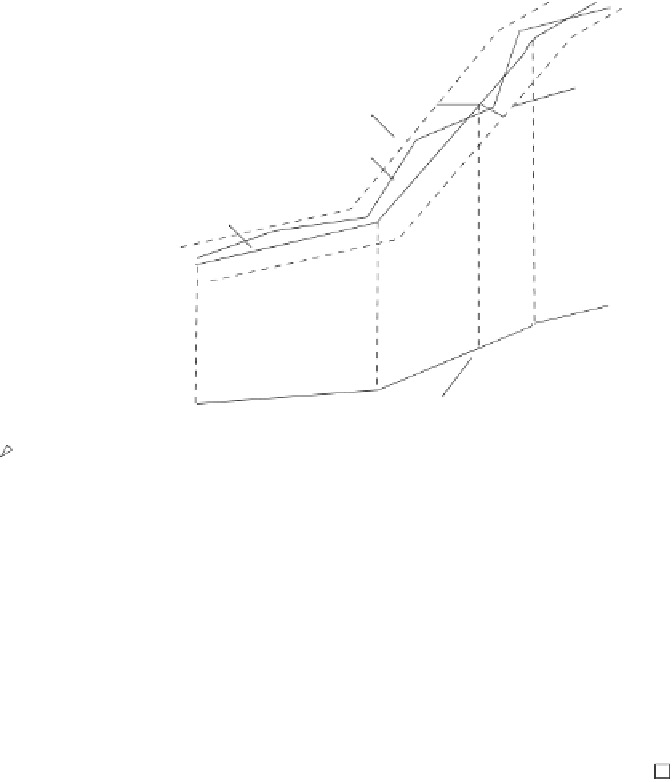
Uncertainty region
r
trajectory volume (cylinder)
(x,y,t)
possible motion curve (PMC)
Uncertain trajectory
x
(x,y)
expected location at time t
y
Figure 5.1 Uncertain trajectories.
any point in time. The deviation is just the distance between the actual and the
expected location. Formally:
Definition 5.1. Let
r
denote a positive real number and
T
denote a trajec-
tory between times
t
1
and
t
n
.An
uncertain trajectory UTr
is the pair (
T,r
),
where
r
is called the uncertainty threshold. For each point (
x,y,t
) in T, its
uncertainty area is a horizontal disk (i.e., the circle and its interior) with
radius
r
centered at (
x,y,t
), where (
x,y
) is the expected location at time
t
∈
[
t
1
,t
n
]
.
Figure
5.1
graphically depicts this definition.
Definition 5.2. Let
UTr
=
(
T,r
) be an uncertain trajectory between instants
t
1
and
t
n
.A
possible motion curve PMC(T)
of
T
is any continuous function
f
pt
with signature
Time
→
R
2
defined in the interval [
t
1
,t
n
] such that for any
t
∈
[
t
1
,t
n
], the 3D point (
f
pt
(
t
)
,t
) is inside the uncertainty area of the expected
location at time
t
.
Intuitively, a PMC describes a possible route (and its associated times) that
a moving object may take without generating an update. In other words, in a
practical situation, a moving object does not need to update the database as long
as it is on some possible motion curve of its uncertain trajectory. The projection
over the plane of a possible motion curve is called a
possible route
.