Information Technology Reference
In-Depth Information
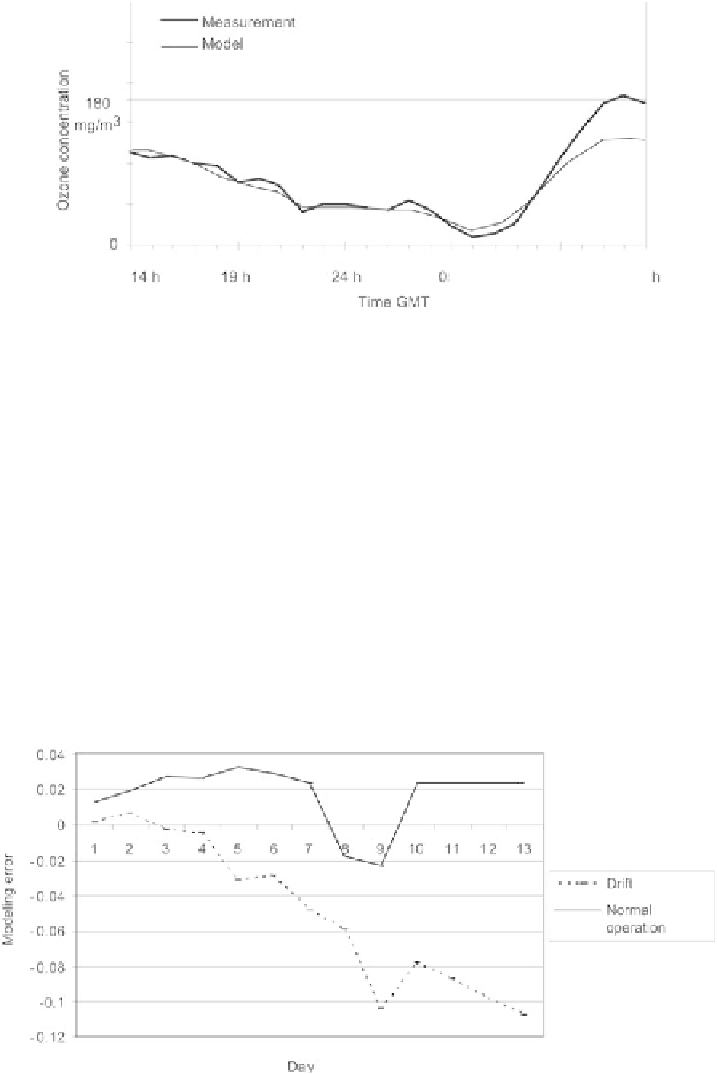
Fig. 1.48.
Measured and predicted ozone concentrations on a day of 1998 (false
negative)
significant discrepancy between the predictions of the model and the results
of measurements results from a fault, such as, in the present example, a sensor
failure.
Two kinds of faults can be present,
•
stuck-at faults: the sensor outputs a constant value,
•
drift: the sensor adds a slow drift to the real height value.
Both types of faults can be detected with recurrent neural networks, especially
with NARMAX models (described in detail in Chaps. 2 and 4). Figure 1.49
displays the various behaviors of the modeling error, depending on whether
the sensor is in normal operation or in drift failure mode.
Fig. 1.49.
Sensor fault detection in a sewer system
Search WWH ::

Custom Search