Information Technology Reference
In-Depth Information
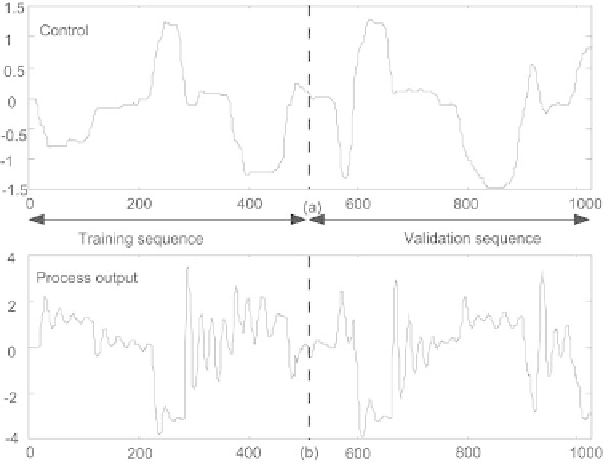
Fig. 1.44.
Training and test sequences for a robot arm
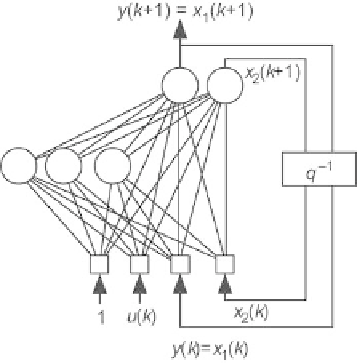
Fig. 1.45.
State-space neural model of the hydraulic actuator. The output is one
of the state variables
The mean square error obtained with that model is 0.07 on the training
set and 0.12 on the validation set, which is very satisfactory given the avail-
able sequences. The modeling errors may be due to disturbances that are not
measured, hence not present as inputs of the model. The results are shown on
Fig. 1.46.
Search WWH ::

Custom Search