Information Technology Reference
In-Depth Information
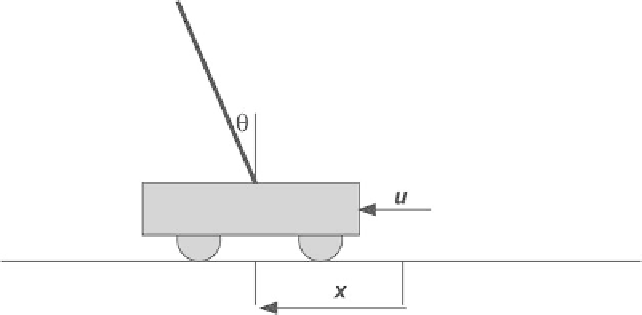
Fig. 5.10.
The pole-cart system
Moreover, a di
cult variant of the inverted pendulum stabilization problem
is studied, where the inverted pendulum is set on a cart and is controlled
by moving the cart. That problem is known as the pole-cart problem. It is a
classical benchmark of nonlinear dynamic system stabilization. A diagram is
shown on Fig. 5.10.
The control is a force, which is applied to the cart. That actuator changes
the state of the cart. Then the inertial force changes also the state of the
pendulum, which is nonlinearly coupled to the state of the cart. There are 4
state variables: the cart position
x
, the pendulum angle
θ
and the associated
velocities. The observable variables are usually the two position variables. The
objective consists in stabilizing the pole. Meanwhile, the cart has to be kept
within a given range around its central position.
The state is not completely known. Therefore, the authors use an Elman
recurrent network to identify the system (Elman recurrent networks are de-
scribed in Chap. 4 in the section devoted to recurrent networks). The diagram
of that kind of network is shown on Fig. 5.11.
The global network is made of the controller and the system model. Two
closed loops are embedded in that network: an external feedback, feeding
back the measurements to the controller, and an internal recurrence of hidden
layer that models the unknown state dynamics. The neural controller itself is
a recurrent network. Its input is the reference and the two observed variables.
Its hidden layer has with six neurons and its output is a self-recurrent neuron.
The training of the recurrent networks is performed by an adaptive Decoupled
Extended Kalman Filter (DEKF) that was presented in the previous chapter,
in the section devoted to Kalman filtering.
The problem is made more di
cult, adding control noise shown previously
in the stabilization of inverted pendulum. The above technique allows the
stabilization of the system in various experimental conditions.
Search WWH ::

Custom Search