Information Technology Reference
In-Depth Information
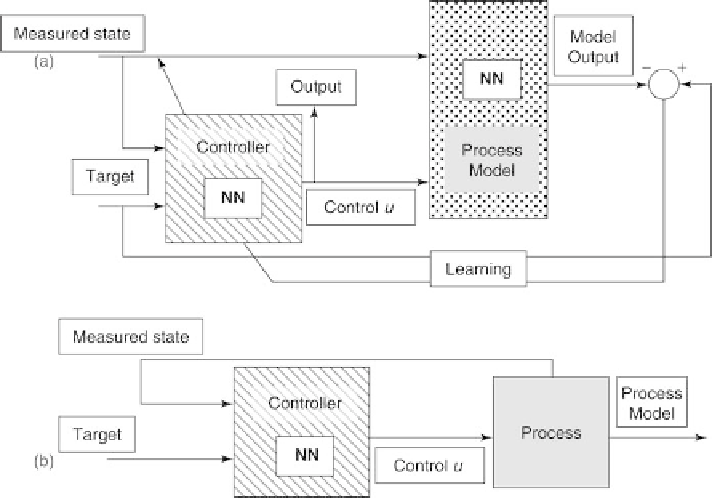
Fig. 5.2.
(
a
) Principle of training and (
b
) operating a closed loop-neural control
which was designed by inverting the model
is a function of the final state in a finite horizon problem, or if it is related to
the whole state trajectory, the above straightforward method cannot be used.
Time unfolding of the global network (controller + model) can be considered
and time delayed back-propagation can be used for training. That methodol-
ogy will be discussed below. Even if the objective is a static function of the
current state, straightforward static training of a neural controller does not
always provide satisfactory results.
In addition, that method is not robust with respect to the modeling er-
rors the control is computed from the model, so that it can be inaccurate if
the model itself is not an accurate approximation of the process. The inter-
nal model control method that will be considered below can overcome that
problem.
5.2.1.1 Illustrative Example: The Inverted Pendulum
The following numerical results show the limits of straightforward inversion
of the process model to build the control law on an elementary example. The
problem is stabilization of the inverted pendulum. That controlled dynamical
system was introduced in the previous chapter, in section “Example: the in-
verted pendulum”. The neural model has been easily identified with a good
accuracy from the state equation. The range of angle variation, which has
Search WWH ::

Custom Search