Information Technology Reference
In-Depth Information
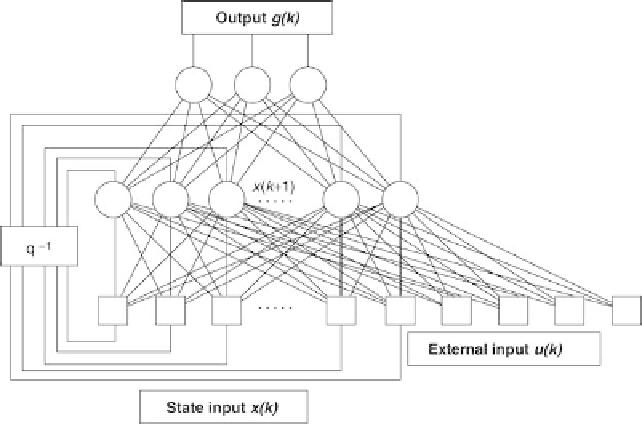
Fig. 4.16.
Application of Elman network for dynamical system modeling
The
Elman network
is a network with one hidden layer. The outputs of
the neurons of that layer are fed back to the network input with a unit time
delay. Therefore, the order of the model is equal to the number of hidden
units. Elman calls the hidden units the contextual units. The network output
at a given time is a nonlinear function of the external input at that time and
of the output of hidden units at the previous time step.
Note that the basic components of an observed dynamical system are
clearly disclosed in the Elman model: the network input layer stands for
the control of the system, the contextual hidden layer stands for the state
of the system, the output layer stands for the measurement. The connection
of the input layer to the hidden layer stands for the influence of the control
on the state evolution.
4.5.3.2 The Hopfield Network
Hopfield networks played an important historical part for several years from
1982. They were motivated by the progress of the statistical physics of dis-
ordered media and its applications to complex systems. In 1982, Hopfield
proposed [Hopfield 1982] a neural network model that was a decisive step
away from the popular perceptron. (The perceptron is studied in detail in
Chap. 6 of this topic). He emphasized the dynamical characteristics of biolog-
ical networks that stem from the recurrent connectivity: a recurrent neural
network, being a dynamical system, exhibits attractors that are steady states
of the dynamics.
Search WWH ::

Custom Search