Information Technology Reference
In-Depth Information
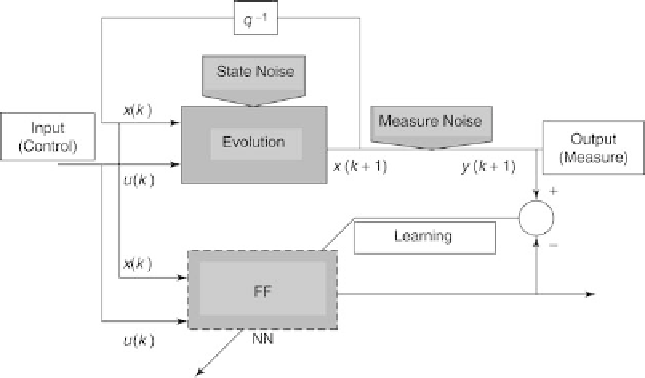
Fig. 4.11.
Identification of the internal neural model of a controlled dynamic system
(teacher forcing learning)
•
the closed loop, which is ensured by the delay operator, and which main-
tains dynamics.
The current state and the control are sent as input to the neural net in its
current configuration.
The state is supposed to be fully measured. In the case of an auto-regressive
model, the current signal and the current control are processed to reconstruct
the current state using delay lines that are shown in Fig. 4.8. The net computes
its own prediction of the next state, which is compared to the state of the
system. The computed prediction error is sent back to the network and is
used to compute the gradient of the criterion, using the back-propagation
algorithm. That supervised control algorithm (teacher forcing algorithm in
control theory) has been described in detail in Chap. 2, in the framework of
nonlinear dynamic system learning.
4.3.5.1 Addressing Measurement Inaccuracy
If measurement noise must be considered, regression identification using feed-
forward neural networks and teacher forcing learning provides poor results.
Some examples of that situation have been provided in this chapter for linear
models, and a numerical demonstration was given in Chap. 2 in the section
dedicated to dynamic systems.
When the state of the system cannot be completely known, the current
state must be estimated. It is not a usual statistical problem, since, at a given
instant, a single data is available. One has to take advantage of past knowledge
provided by previous data. That is the purpose of filtering algorithms, which
are the topics of next section.
Search WWH ::

Custom Search