Information Technology Reference
In-Depth Information
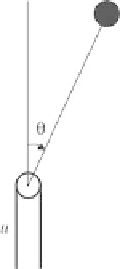
Fig. 4.2.
Diagram of the inverted pendulum
4.1.5 Example of Nonlinear Oscillator: The Van Der Pol Oscillator
Stable oscillations in uncontrolled operating mode are another example of ad-
verse oscillations in physical devices. They arise very frequently from nonlin-
earities. A typical example is provided by the following Van der Pol differential
equation:
d
2
x
d
t
2
−
2
zω
0
d
x
d
t
+
ω
0
x
+3
kx
2
d
x
d
t
=
u.
The parameter
z
is the damping rate of the system and
ω
0
is the eigenfre-
quency of the oscillator. The state representation is 2-dimensional, i.e.,
x
1
x
2
=
+
0
u
.
x
2
d
d
t
ω
0
x
1
−
3
kx
1
x
2
2
zω
0
x
2
−
Note that the system is linear with respect to the control. The dynamics
of the uncontrolled system (
u
= 0) in the 2-dimensional sate space features
a limit cycle as an attractor. That means that, whatever the initial state,
the state trajectory winds around a specific periodic trajectory when times is
going on. This phenomenon is illustrated on Fig. 4.3:
4.1.6 Markov Chain as a Model for Discrete-Time Dynamical
Systems with Noise
Let us now return to discrete-time dynamical systems. Consider first the fol-
lowing very simple dynamical system: the random walk on a triangle. The
state space has three elements
a,b
and
c
. The dynamics is defined by the
following evolution function
f
:
f
(
a
)=
b, f
(
b
)=
c, f
(
c
)=
a.
Search WWH ::

Custom Search