Information Technology Reference
In-Depth Information
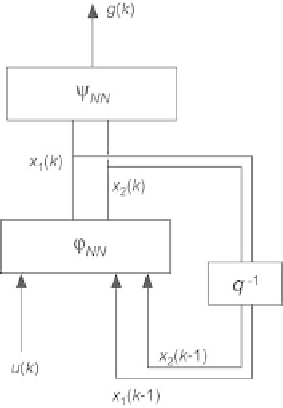
Fig. 2.42.
Ideal model for a state-space representation with the “output noise”
assumption
Then, from an argument that is similar to those developed for input-output
models, the inputs of the ideal model should be, in addition to the control
inputs
u
, the state variables of the process. Two situations must be considered:
•
Those variables are measured: then they can be considered as outputs, so
that the problem is amenable to the design of an input-output model: the
ideal model is a feedforward one, which can essentially be operated as a
one-step-ahead predictor.
•
Those variables are not measured: then the ideal model cannot be con-
structed; in such a case, one should either use an input-output representa-
tion (although not completely general), or design a feedback model (al-
though non optimal).
Output Noise and State Noise (State-Space Representation)
Finally, we assume that the process can be appropriately described by the
equations
x
(
k
)=
ϕ
(
x
(
k
−
1)
,
u
(
k
−
1)
,
b
1
(
k −
1))
,
y
(
k
)=
ψ
(
x
(
k
))
.
Here again, two cases must be considered:
•
If the state variables are measured, they can be regarded as outputs, so that
the problem is amenable to the design of an input-output representation,
as described previously.
Search WWH ::

Custom Search