Information Technology Reference
In-Depth Information
Training of the Model: Semidirected Training
The training of a recurrent model can be cast into the framework of the
training of a feedforward neural network, as will be shown below in the section
devoted the training of recurrent neural networks (“semidirected training”).
Operation of the Model
As opposed to the previous case, the model can be operated as a simulator in
optimal conditions. Of course, it can also serve as a one-step-ahead predictor.
2.7.2.2 Illustration
Before carrying on with the main assumptions, we illustrate the importance
of the proper choice of the training procedure depending on the influence of
the noise on the process. This illustrative example is excerpted from [Nerrand
1992] and [Nerrand et al. 1994].
Modeling a Process with Output Noise
We consider a computer-simulated process that obeys the following equations:
x
p
(
k
)=
1
x
p
(
k
1) +
T
c
+
dx
p
(
k
u
(
k
T
a
+
bx
p
(
k −
1)
1)
a
+
bx
p
(
k −
1)
−
−
−
−
1)
,
y
p
(
k
)=
x
p
(
k
)+
b
(
k
)
,
with
a
=
0
.
326, and sampling period
T
=0
.
1
sec.
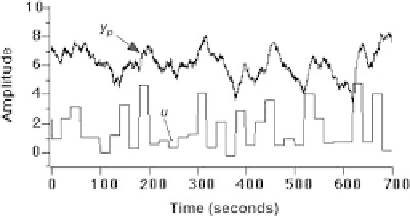
b
(
k
) is a white noise with maximum amplitude 0.5. Thus it is a process
with output noise. Figure 2.34 shows the response of the simulated process to
a pseudo-random sequence of steps.
When modeling a real process, the influence of noise is generally not
known. Therefore, several possible assumptions are made; trainings are per-
formed according to each assumption, and the results are compared. We use
that approach in the present academic example.
−
0
.
139,
b
=1
.
2,
c
=5
.
633,
d
=
−
Fig. 2.34.
Response of the simulated process to a pseudo-random step sequence
Search WWH ::

Custom Search