Image Processing Reference
In-Depth Information
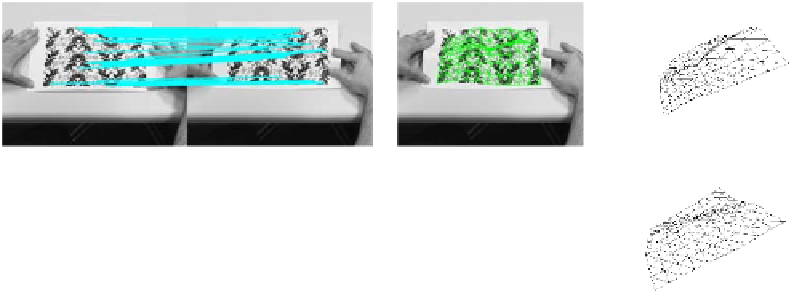
Figure 4.13:
Repetitive texture.
Top Row
The established correspondences between the reference and
the target image, reconstructed 3D mesh reprojected into the target image, and the same mesh seen from
a different viewpoint for the method of
Salzmann and Fua
[
2011
].
BottomRow
Similar outputs for the
method of
Shaji
et al.
[
2010
]. © 2010 IEEE.
than one point in the input image. This amounts to adding new lines in the matrix
M
of Eq.
4.1
and
to introducing indicator variables that encode which ones of these correspondences are truly active.
The quadratic problem of
Salzmann and Fua
[
2011
] becomes a mixed integer quadratic problem,
which is NP-hard. Nevertheless, a branch-and-bound strategy was shown to yield good approxi-
mate solutions
Shaji
et al.
[
2010
], at the cost of increased computational complexity with respect
to
Salzmann and Fua
[
2011
]. In
Sanchez-Riera
et al.
[
2010
], correspondences are also established
simultaneously as the shape is recovered. In that case, given a shape prior modeled as a mixture of
Gaussians, a strategy based on Kalman filtering is employed to progressively reduce the number of
2D point candidates that can be matched to a 3D point.
4.2.3 DISTANCE CONSTRAINTS
As discussed in Section
4.2.2
, whether enforced locally or globally, smoothness by itself does not
suffice to make the 3D monocular surface reconstruction problem well-posed and to guarantee
a unique solution. Additional constraints are required. Enforcing distances across the deforming
surface to be preserved has proved an effective way of disambiguating shape recovery.
In
Salzmann
et al.
[
2008a
], reconstruction was performed under a global linear subspace
model. The modal weights
c
were expressed as the weighted sum of Eq.
4.9
and the weights
β
i
became the unknowns of the problem. Overcoming the ambiguities left by the smoothness con-
straints was done by choosing the weights
β
i
that result in a surface in which the Euclidean distances
between neighboring vertices remain as similar as possible to their value in the reference configura-
tion. These constraints can be expressed as
2
=
l
i,j
,
∀
(i, j)
∈
E
v
i
−
v
j
,
(4.15)


Search WWH ::

Custom Search