Image Processing Reference
In-Depth Information
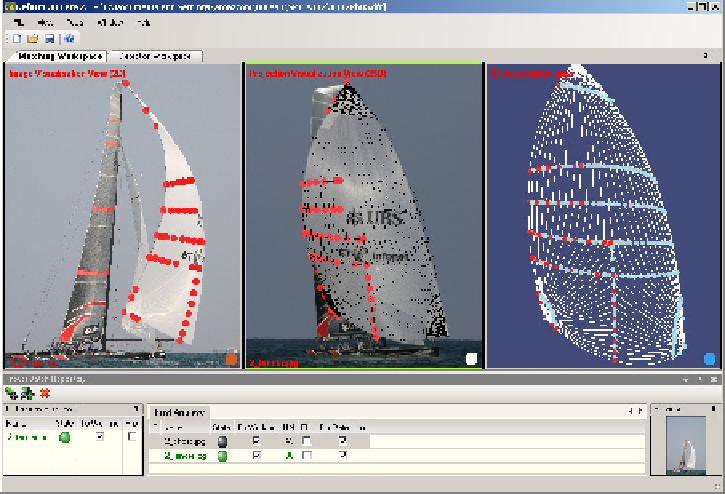
Figure 4.8:
Screen capture of the semi-automated system that was delivered to Team Alinghi to compute
the 3D shape of their sails after training sessions.
integrated into a semi-automated system, depicted by Fig.
4.8
, that was designed to recover the 3D
shape of sails and delivered to the Team Alinghi, the syndicate that won the America's Cup in 2003
and 2007. For a surface such as the one of Fig.
4.8
that is modeled by a 1200-vertex mesh, involving
3600 degrees of freedom, 30 to 40 modes are typically enough to model smooth deformations.
By reducing the number of variables to be optimized, the modal representation makes it
easy to integrate additional information sources, which require the minimization of a nonlinear
criterion. However, while effective, this kind of approach suffers from the fact that a non-convex
objective function must be minimized and that, therefore, convergence to a desirable local optimum
cannot be guaranteed. When using correspondences alone, this limitation can be removed as fol-
lows
Salzmann
et al.
[
2008a
]. Recall that the 3D mesh representing the surface must be such that
the vector
x
obtained by stacking the coordinates of its vertices must satisfy the linear system of
Eq.
4.1
. Injecting the formulation of Eq.
4.6
into Eq.
4.1
means that the weights
c
must be solution
of
MSc
=−
Mx
0
.
(4.7)
Search WWH ::

Custom Search