Database Reference
In-Depth Information
3.1 Modeling
RL was based originally on methods of dynamic programming (DP, the mathemat-
ical theory of optimal control), albeit that in machine learning, the theories and
terminology have since been developed beyond DP. Central to this - as is usual in
AI - is the term
agent
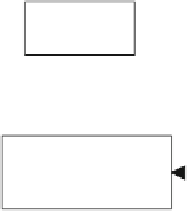
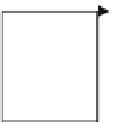
. Figure
3.1
shows the interaction between agent and
environment in reinforcement learning.
The agent passes into a new
state (s
), for which it receives a
reward (r
)fromthe
environment, whereupon it decides on a new
action (a
) from the admissible
action set
for
s
(
A(s)
), by which in most cases it learns, and the environment responds in turn to
this action, etc. In such cases, we differentiate between
episodic tasks
, which come to
an end (as in a game), and
continuing tasks
without any end state (such as a service
robot which moves around indefinitely). The goal of the agent consists in selecting the
actions in each state so as to maximize the sum of all rewards over the entire episode.
The selection of the actions by the agent is referred to as its
policy
, and that policy
which results in maximizing the sum of all rewards is referred to as the
optimal policy
.
Example 3.1
As the first example for RL, we can consider a robot, which is
required to reach a destination as quickly as possible. The states are its coordinates,
the actions are the selection of the direction of travel, and the reward at every step
is
1. In order to maximize the sum of rewards over the entire episode, the robot
must achieve its goal in the fewest possible steps.
π
■
Example 3.2
A further example is chess once again, where the positions of the
pieces are the states, the moves are the actions, and the reward is always 0 except in
the final position, at which it is 1 for a win, 0 for a draw, and
1 for a loss (this is
what we call a
delayed reward
).
■
Example 3.3
A final example, to which we will dedicate more intensive study, is
recommendation engines. Here, for instance, the product detail views are the states,
the recommended products are the actions, and the purchases of the products are the
rewards.
■
Agent
reward
r
t
action
a
t
state
s
t
r
t
+1
Environment
s
t
+1
Fig. 3.1 The interaction between agent and environment in RL