Environmental Engineering Reference
In-Depth Information
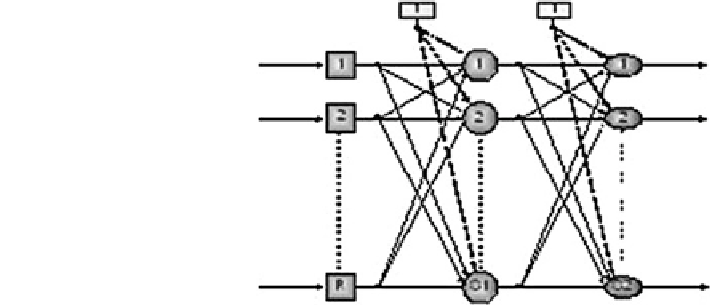
Fig. 5.3 Schematic of MLP
with a hidden layer
where R = numbers of input vector components. S
1
and S
2
= numbers of neurons in
hidden and output layers, respectively. P = input vector. w
1
and w
2
= weighting
matrix in hidden and output layers, respectively. b
1
=b
2
are bias vectors in Hidden
and output layers, respectively. G and F = neuron transfer functions in hidden and
output layers respectively (Menhaj and Safepoor
1998
).
For further reading see references (Menhaj and Safepoor
1998
).
5.3.2 Dynamic ANN Models
The inputs of dynamic are the same as the static model; the difference is that the
effect of the past period is considered in this model. There are several methods by
which a static model can be turned to dynamic. One of them is Time Delay Neural
Network (TDNN) operators. A TDNN operator receives an input signal and keeps it
for a time step. And in the next time step the input signal emerges as an output
result. By connecting N series of TDNN operator, Tapped Delay Line (TDL) will
be obtained. The output is a vector with N + 1 components. The N + 1 components
include the input in the current time step and N time steps before.
5.3.3 Data Preparation
Considering the application of sigmoid tangent in the hidden layers of the networks
and the special formula of this function, the scale of input data have to be changed.
Considering Fig.
5.2
sigmoid tangent function, it is clear that the slope of this function
is differentiated according to the sums in the interval (1,
1) of the ambient and has
few changes out of this interval. For all data, output and input should be transformed
to the (1,
−
−
1) interval to prevent the network saturation (Asadollahfardi
2012
).
Search WWH ::

Custom Search