Biomedical Engineering Reference
In-Depth Information
(a)
(b)
(c)
(d)
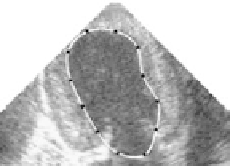
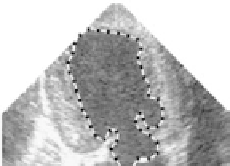
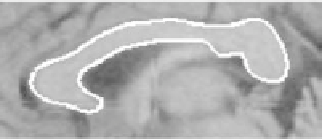
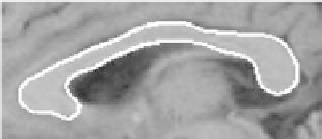
Figure 20.
Segmentation results using the probabilistic model proposed in [48]: (a) initial
contour drawn on an ultrasound image of dog heart; (b) final segmentation result; (c,d)
segmentation of corpus callosum from MR images. Reprinted with permission from [48].
Copyright c
2004, IEEE.
where
R
1
and
R
2
are two regions in the image and the entire image domain
R
2
.
S
and
S
are the regions inside and outside the curve, respectively.
Thus, the optimal segmentation is obtained when
S
=
R
1
and
S
=
R
2
. It can be
shown that Eq. (23) can be rewritten as [48]
R
=
R
1
∪
S
−
log(
P
(
f
(
s
)
|
ds.
s
∈
R
1
))
E
region
=
(24)
log(
P
(
f
(
s
)
|
s
∈
R
2
))
Figure 20 illustrates segmentation results using the probabilistic model in [48].
Evaluation of the energy minimization equation for the snake using this kind of
probability density function requires estimation of these functions. As previously
mentioned, the probability is estimated from the a-priori information and approx-
imated as a Gaussian distribution with a certain mean and standard deviation. In
situations where the a-priori distributions are not known, they can be estimated
dynamically [48]. However, there is risk involved with this dynamic approach of
incorporating more uncertainty into the system. Nevertheless, the probabilistic
approach has proved to be a better solution for snake decomposition compared to
the one without any a-priori information. It is important to note that Eqs. (24)
and (25) balance the force from both the object and background feature space in
contrast to Eq. (23), which uses information about only the object feature. Since
by principle the requirement is to optimally use the information from the two