Biomedical Engineering Reference
In-Depth Information
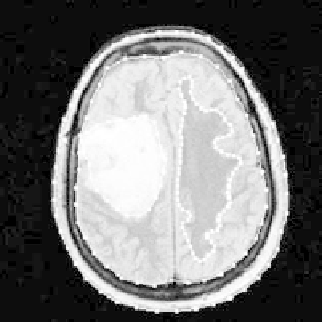
(a)
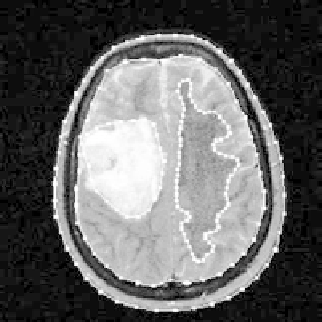
(b)
Figure 19.
Segmentation results in sections of NMR images of brain using statistical
snake. Reprinted with permission from [31]. Copyright c
1994, British Machine Vision
Association Press.
and is defined as
+1
|
f
(
x, y
)
−
|≤
if
µ
kσ,
G
(
f
(
x, y
)=
(22)
−
1
if
|
f
(
x, y
)
−
µ
|
>kσ,
where
µ
defines the mean, and
σ
is the standard deviation of the intensity distribu-
tion in the object region. Thus, the force field exerts a unit outward pressure when
the contour is inside the object region and an inward pressure when the contour
lies outside the object region. This is attributable to the bidirectional nature of
the active contour model. The force can be modeled to vary with the distance
from the mean of the object intensity, i.e., when the control point of the snake is
near a mean object feature, the propagation force is high, and as it moves away
from the mean the force decreases, until it starts reversing direction as it crosses
the entire object feature distribution zone. A linear model and a model based on
Mahalanobis distance are also computed in [31].
These approaches are essentially a probabilistic approach with a pixel having a
certain confidence level belonging to some a-priori distribution. Suppose the image
has two main regions, with different probability distributions. A simple example
is the case where we have to segment a white object from a dark background;
the regions will have different means and possibly different variances. Jacob
et al. [48] used a region likelihood function defined as follows:
E
region
=
−
S
log(
P
(
f
(
s
)
|
s
∈
R
1
))
ds
−
log
P
(
f
(
s
)
|
s
∈
R
2
))
ds,
(23)
S