Biomedical Engineering Reference
In-Depth Information
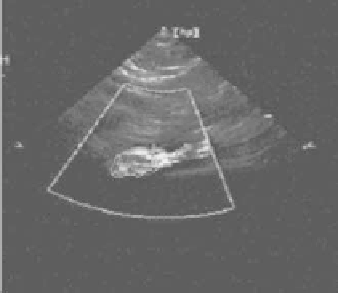
(a)
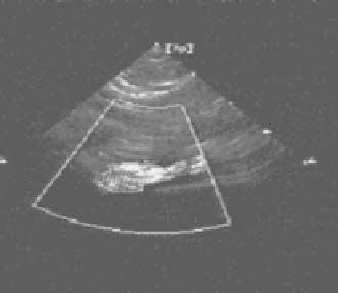
(b)
Figure 16.
Illustration of homogeneity-induced inertial snake [32] in segmentation of
Doppler ultrasound images.
See attached CD for color version.
and background. This can be accomplished if only some form of information that
discriminates between object and background is known a priori.
4.1. Shape A Priori
Among other features, shape can be used to discriminate object from back-
ground. This is applicable where the target object has a well-defined shape, distinct
frommost other structures in the image. Some work has been reported using shape
[38, 39] to identify object from background. If the shape pattern is known a priori
from a set of statistical distributions of object shapes, then a shape model can be
defined based on those available shapes. These shape models are usually defined
as probabilistic distributions, where a Gaussian distribution is defined for each of
the “modes” of the shape about a mean model. This “mode” can be represented in
any form, like a Fourier [38] or point-wise representation [40, 41], or some other
form of expression. In each case, the underlying theory is to define a symmetric
model that captures the statistical variation of the a-priori shapes from a mean
shape defined as
N−
1
N
x
=
x
i
,
(18)
i
=0
where
x
i
is the
i
th shape vector defined by some form of
shape descriptor.
N
is the total number of shapes known a priori. The main moti-
vation is to represent a curve in using a shape descriptor and associate a probability
distribution on the parameters based a-priori knowledge about the shape. The prior
information available is a flexible bias toward more likely shapes. The parame-
terization itself should be expressive enough to represent any potential shape of
x
is the mean shape, and