Biomedical Engineering Reference
In-Depth Information
Table 2.
Robustness to Initialization
X Translation (mm)
-10
-5
0
5
10
DSC
0.9287
0.9297
0.9327
0.9289
0.9300
D
surf ace
(mm)
2.1358
2.0910
2.0673
2.1080
2.1105
D
centroid
(mm)
1.3942
1.4657
1.4826
1.4685
1.5481
distribution and the distribution of the shape embedding functions nevertheless al-
lows to compute the desired segmentation. Yet, one may ask where the limitations
of our model are. At what point does segmentation accuracy break down?
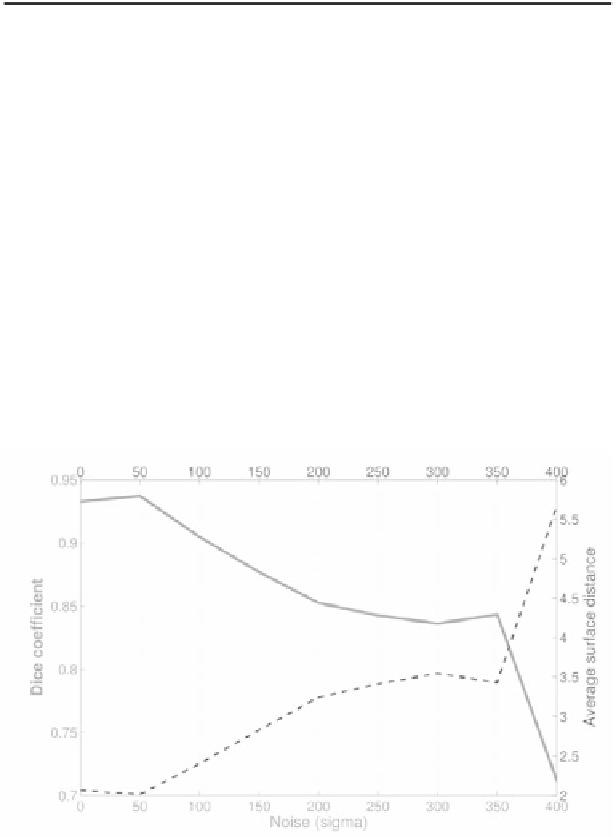
To investigate this, we artificially added noise to the images, computing at each
time the segmentation accuracy. Figure 9 shows both the Dice coefficient defined
in (10) and the average surface distance defined in (11) of the final segmentation as
a function of the noise. While the segmentation is rather good over a large range
of noise values, it does decay at very large values of noise.
Figure 9.
Robustness to noise. See attached CD for color version.
5.2.5. Efficiency versus accuracy: How many eigenmodes are needed?
The efficiency of our implementations arises because we solve the level
set computation in the low-dimensional linear subspace spanned by the training
shapes. Given
N
training shapes, this will typically amount to an optimization of
N
−
1 parameters.