Biomedical Engineering Reference
In-Depth Information
8
x10
-3
7
6
5
4
3
2
1
0
0
0.03
0.025
0.02
0.015
0.01
0.005
0
0
50
100
150
200
250
100 200 300 400 500 600 700 800
Cardiac ultrasound
Histograms
Prostate CT
Histograms
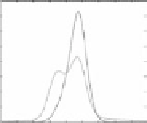
Figure 1.
Segmentation challenges and estimated intensity distributions. The two curves
on the right correspond to the empirical probability of intensities inside and outside the left
ventricle (for the ultrasound image) and the prostate (for the CT image). The region-based
segmentation of these structures is a challenging problem, because objects and background
have similar histograms. Our segmentation scheme optimally exploits the estimated prob-
abilistic intensity models. See attached CD for color version.
2.
LEVEL SET SEGMENTATION AS BAYESIAN INFERENCE
The goal of level set segmentation can be formulated as the estimation of the
optimal embedding function
φ
:Ω
→
R
. In the Bayesian
framework, this can be computed by maximizing the posterior distribution
given an image
I
:Ω
→
R
P
(
φ
|
I
)
∝P
(
I
|
φ
)
P
(
φ
)
.
(2)
The maximization of (2) results in a problem of infinite-dimensional opti-
mization. Given a set of training shapes encoded by their signed distance functions
{
φ
i
}
i
=1
...N
, Tsai et al. [7] proposed reducing the segmentation problem to one of
finite-dimensional optimization by constraining the optimization problem to the
finite-dimensional subspace spanned by the training shapes.
In this chapter we make use of this compact representation of the embedding
function. Given the distance
d
on the space of signed distance functions defined
by
d
2
(
φ
1
,φ
2
)=
φ
2
(
x
))
2
dx
, we align the set of training shapes with
respect to translation and rotation. Subsequently, we constrain the level set function
φ
to a parametric representation of the form:
Ω
(
φ
1
(
x
)
−
n
φ
α
,h,θ
(
x
)=
φ
0
(
R
θ
x
+
h
)+
α
i
ψ
i
(
R
θ
x
+
h
)
,
(3)
i
=1
where
φ
0
(
x
)=
N
i
=1
ψ
i
(
x
)
}
i
=1
...n
are the
eigenmodes of the distribution, and
n<N
is the dimension of the subspace spanned
by the
N
training shapes. The parameter vector
φ
i
(
x
) represents the mean shape,
{
α
=(
α
1
,...,α
n
) models shape
∈
[0
,
2
π
]
3
model translation and
rotation of the respective shape. In our applications, where the scale of objects is
known, a generalization to larger transformations groups (e.g., similarity or affine)
did not appear useful.
∈
R
3
and
θ
deformations, while the parameters
h