Biomedical Engineering Reference
In-Depth Information
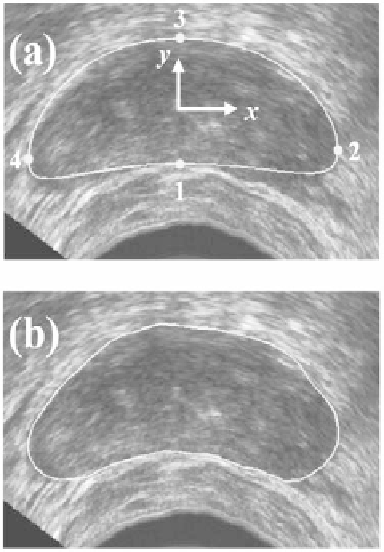
Figure 2.
Initialization and deformation stages of the prostate segmentation algorithm.
(a) Initial outline showing the four user-selected points, labeled (1)-(4) along with the
local
x
−
y
coordinate system defined from these points. (b) Final outline obtained after
deforming the DDC. Reprinted with permission from the AAPM. See attached CD for
color version.
shape within each segment is estimated using the following parametric equations:
x
(
s
)=
a
3
s
3
+
a
2
s
2
+
a
1
s
+
a
0
,
p
(
s
)=
(6)
y
(
s
)=
b
3
s
3
+
b
2
s
2
+
b
1
s
+
b
0
,
T
is the position of a point on the DDC having coordinates (
x, y
),
s
is a parameter that varies from 0 at the starting point of the segment to 1 at
the ending point, and
a
i
and
b
i
where
p
=(
x, y
)
(
i
=0
,
1
,
2
,
3) are unknown coefficients. The
coefficients can be calculated using Eqs. (14a) and (14b) and Table 1 in Ladak
et al. [31]. After calculating the coefficients, points are uniformly generated within
each segment at every ∆
s
=0
.
1 units. Figure 2a shows an example initialization.