Biomedical Engineering Reference
In-Depth Information
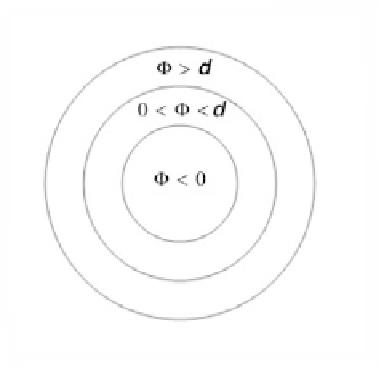
Figure 12.
The brain can be simplified and modeled as three concentric spheres (or circles
in 2D). The areas of
Φ
<
0
,
0
<
Φ
<d
, and
Φ
>d
represent the WM, GM, and CSF
respectively.
set model [98] and construct two level set functions to represent the WM/GM
and GM/CSF surfaces. However, this would double computational expenses.
However, this issue can be addressed by considering the “average” property of
integration calculations. Mathematically, integration can be approximated as a
summing-up calculation, which averages out local differences on a global scale.
Therefore, in spite of its local inaccuracy, our model is correct globally and does
not affect our formulation in Eq. (28). Moreover, compared to a multiphase level
set model, our model utilizes only one level set to represent two surfaces, which
greatly reduces the 3D computational expense.
5.2.2. Define boundary information
Conventionally, an edge map is determined by voxels and their immediate
neighborhoods. Two principal characteristics of an edge map are magnitude and
direction. Normally, they are quantified by operators (e.g., the Roberts, Sobel,
Prewitt, Kirsch, or Laplacian operators). However, they cannot yield satisfactory
results when applied to MR images (see Figure 13). An alternative approach was
proposed in [59], and it produced an attractive result. A similar idea was presented
in [99], in which a histogram was used to coarsely estimate the parameters and an
EM algorithm was adopted to estimate them iteratively. One disadvantage of this
method was its high computational complexity, however.
In this section we present a novel approach to edge detection in a Bayesian
scheme. It takes into account the ribbon-like nature of the cortex, thus avoiding