Information Technology Reference
In-Depth Information
Abbildung 9.8: Ein vektorielles
rückgekoppeltes neuronales Netz
zur Berechnung eines schrägen
Wurfs unter Berücksichtigung
Stokesscher Reibung.
r
0
r
(
t
)
0
t
tg
e
y
t
v
0
y
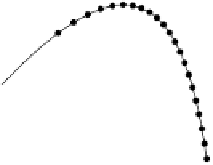
Abbildung 9.9: Durch das rückge-
koppelte neuronale Netz aus Ab-
bildung 9.8 berechnete Bahn ei-
nes schräg geworfenen Körpers.
x
1
2
3
1989]. Bei niedrigen Geschwindigkeiten kann man meist die Newtonsche, bei hohen
Geschwindigkeiten die Stokessche Reibung vernachlässigen. Wir betrachten hier ex-
emplarisch nur die Stokessche Reibung. In diesem Fall beschreibt die Gleichung
a
=
v
=
˙
r
die durch den Luftwiderstand verursachte Abbremsung des Körpers, wobei
eine
von der Form und dem Volumen des Körpers abhängige Konstante ist. Insgesamt
haben wir daher die Differentialgleichung
r
=
˙
¨
r
g
e
y
.
Mit Hilfe der Zwischengröße
v
=
˙
r
erhalten wir
˙
˙
r
=
v
,
v
=
v
g
e
y
,
woraus sich die Rekursionsformeln
r
(
t
i
)=
r
(
t
i
1
)+
t v
(
t
i
1
)
,
v
(
t
i
)=
v
(
t
i
1
)
t v
(
t
i
1
)
tg
e
y
ergeben. Das zugehörige Netz ist in Abbildung 9.8 gezeigt. Durch die Rückkopplung
am unteren Neuron wird die Stokessche Reibung berücksichtigt.
Eine Beispielrechnung mit
v
0
=
8,
=
45
o
,
=
1.8 und
t
=
0.05 zeigt Abbil-
dung 9.9. Man beachte den steileren rechten Ast der Flugbahn, der die Wirkung der
Stokesschen Reibung deutlich macht.
Als zweites Beispiel betrachten wir die Berechnung der Umlaufbahn eines Plane-
ten [Feynman u. a. 1963]. Die Bewegung eines Planeten um ein Zentralgestirn (Son-
ne) der Masse
m
am Ursprung des Koordinatensystems kann beschrieben werden
durch die vektorielle Differentialgleichung
r
=
m
r
|
¨
r
|
3
,