Environmental Engineering Reference
In-Depth Information
6
6
i
1
i
2
i
1
i
2
4
4
2
2
0
0
−2
−2
−4
−4
7
7.01
7.02
7.03
7.04
7.05
7.06
7
7.01
7.02
7.03
7.04
7.05
7.06
Time [s]
Time [s]
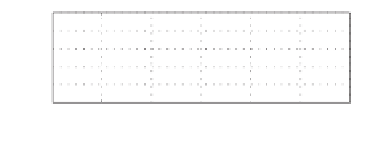
(a) Currents in the steady state
20
20
10
10
0
0
−10
−10
−20
−20
7
7.01
7.02
7.03
7.04
7.05
7.06
7
7.01
7.02
7.03
7.04
7.05
7.06
Time [s]
Time [s]
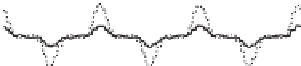
(b) Output voltage
20
20
16
16
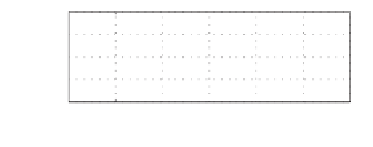
THD=15.92%
THD=8.57%
12
12
8
8
4
4
0
0
1
3
5
7
9
11
13
15
17
19
1
3
5
7
9
11
13
15
17
19
Harmonic order
Harmonic order
(c) Magnitude of the harmonic voltages w.r.t. the fundamental component
Figure 21.9
Experimental results (II): without the harmonic droop controller (left column) and with a
3rd and 5th harmonics droop controller (right column)
The experiments were carried out in three stages: (1) Inverter 1 was supplying the load; (2)
Inverter 2 was put in parallel operation with Inverter 1; and (3) Inverter 2 was disconnected
from the parallel operation. The experimental results are divided into two parts and shown in
the left column of Figures 21.8 and 21.9 when the harmonic droop controller was not adopted
and in the right column of Figures 21.8 and 21.9 when it was added for the 3rd and 5th
harmonics. Since the dynamic process at the fundamental frequency is much lower than that
at harmonic frequencies, the dynamics of the system is dominated by that of the fundamental
droop controller and the harmonic droop controller does not bring noticeable change to the
response speed for the real power, the reactive power, the frequency and the output voltage
RMS.
2
There was no noticeable change in the steady-state performance of voltage regulation
and the accuracy of power sharing, either. After the harmonic droop controller was introduced,
there was significant improvement in the THD of the output voltage: from 22% to 12% for
one inverter and from 15
57% for two inverters in parallel. This corresponds to the
improvement of 46%. The 3rd harmonics was reduced from 14% to 4
.
92% to 8
.
5% although there was
a slight increase in the 5th harmonics. The voltage THD is lower than that obtained from the
simulation because of the filtering effect in the practical system.
.
2
On the other hand, in order to handle high-order harmonics, the sampling speed of the controller needs to be
increased.






























































































































Search WWH ::

Custom Search