Environmental Engineering Reference
In-Depth Information
E
*
-
K
RMS
e
-
E
i
1
P
i
n
i
s
v
o
v
ri
Q
i
1
i
m
i
s
ω
i
t+
δ
i
*
ω
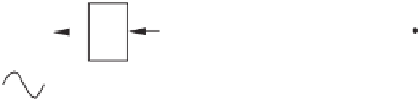
Figure 19.7
Robust droop controller for R-inverters
However, it does not work for the stand-alone mode because the actual power
P
i
is determined
by the load and
E
i
cannot be 0. This is why different controllers had to be used for the stand-
alone mode and the grid-connected mode, respectively. When the operation mode changes, the
controller needs to be changed as well. It would be advantageous if the change of controller
could be avoided when the operation mode changes.
Another issue is that, according to (19.1), the load voltage
v
o
drops when the load increases.
The voltage also drops due to the droop control, according to (19.5). The smaller the coefficient
n
i
, the smaller the voltage drop. However, the coefficient
n
i
needs to be big to obtain a fast
response. In order to make sure that the voltage remains within a certain required range,
the load voltage drop
E
∗
−
V
o
needs to be fed back in a certain way, according to the basic
principles of control theory. It can be added to
E
i
via an amplifier
K
e
. This actually results in
an improved droop controller shown in Figure 19.7. This strategy is able to eliminate (at least
considerably reduce) the impact of computational errors, noises and disturbances. As will be
explained below, it is also able to maintain accurate proportional load sharing and hence is
robust with respect to parameter drifts, component mismatches and disturbances.
In the steady state, the input to the integrator should be 0. Hence,
K
e
(
E
∗
−
n
i
P
i
=
V
o
)
.
(19.16)
The right-hand side of the above equation is always the same for all inverters operated in
parallel as long as
K
e
is chosen the same, which can easily be met. Hence,
n
i
P
i
=
constant
,
which guarantees accurate real power sharing without having the same
E
i
. This is more natural
than the case with the conventional droop controller. The accuracy of real power sharing no
longer depends on the inverter output impedances (including the feeder impedance) and is also
immune to numerical computational errors and disturbances.






















Search WWH ::

Custom Search