Environmental Engineering Reference
In-Depth Information
5
5
i
ref
i
a
i
ref
i
a
2.5
2.5
0
0
−2.5
−2.5
−5
−5
1.5
1.5
e
i
e
i
1
1
0.5
0.5
0
0
−0.5
−0.5
−1
−1
−1.5
−1.5
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
Time [s]
Time [s]
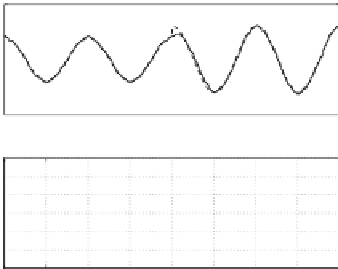
(a) Grid output current
, its reference
and current tracking error
15
15
THD of i
a
=17.64%
THD of i
a
=16.71%
10
10
5
5
0
0
0
5
10
15
20
25
30
0
5
10
15
20
25
30
Harmonics order
Harmonics order
(b) Grid output current
harmonic spectra
Figure 16.8
Experimental results for a PR controller with a non-linear local load implemented in the
αβ
frame (left column) and in the
abc
frame (right column)
error
e
i
are shown in the left column of Figure 16.9 for the implementation in the
frame and
in the right column of Figure 16.9 for the implementation in the
abc
frame. Both controllers
demonstrated very fast dynamics, following the reference signal
i
ref
closely. The implemen-
tation in the
abc
frame demonstrated better performance than the implementation in the
αβ
αβ
frame.
5
5
i
ref
i
a
i
ref
i
a
2.5
2.5
0
0
−2.5
−2.5
−5
−5
1.5
1.5
e
i
e
i
1
1
0.5
0.5
0
0
−0.5
−0.5
−1
−1
−1.5
−1.5
−0.04
−0.03
−0.02
−0.01
0
0.01
0.02
0.03
0.04
−0.04
−0.03
−0.02
−0.01
0
0.01
0.02
0.03
0.04
Time [s]
Time [s]
Figure 16.9
Transient response of the PR controller in the grid-connected mode without a local load
implemented in the
αβ
frame (left column) and in the
abc
frame (right column)


















































































































































Search WWH ::

Custom Search