Environmental Engineering Reference
In-Depth Information
6
6
i
ref
i
a
i
ref
i
a
3
3
0
0
−3
−3
−6
−6
2
2
e
i
e
i
1
1
0
0
−1
−1
−2
−2
−0.1
0
0.1
0.2
0.3
0.4
−0.1
0
0.1
0.2
0.3
0.4
Time [s]
Time [s]
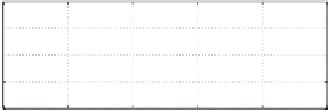
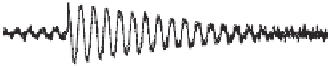
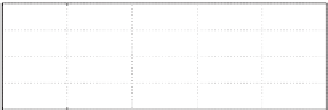
Figure 6.15
Grid current
i
a
, its reference
i
ref
and the current tracking error
e
i
in response to a 1 A
step change in
I
d
: current-voltage
H
∞
repetitive controller (left column) and PR current-
H
∞
repetitive
voltage controller (right column)
6.6.3 Transient Performance
6.6.3.1 To the Change of Grid Current Reference
I
d
(without a Local Load)
A step change in the grid current
I
d
reference from 2 A (1
.
41 A RMS) to 3 A (2
.
12 A RMS)
was applied (while keeping
I
q
0). The grid current
i
a
, its reference
i
ref
and current tracking
error
e
i
are shown in Figure 6.15. The controller took about 12 cycles to settle down and
the PR current-
H
∞
voltage controller took about 8 cycles to settle down. This is reasonable
because each repetitive controller takes about 5 cycles to settle down. This reflects the trade-off
between low THD and system response speed.
=
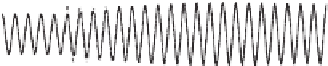
6.6.3.2 To Load Changes
The filter inductor current and the tracking error between the grid current and the reference
current, when the three-phase resistive local load was changed from
R
A
=
R
B
=
R
C
=
12
to
R
A
=
and back, are shown in Figure 6.16. The detailed grid current
and the reference current, together with the current tracking error, and the inverter local load
voltage and its reference, together with the tracking error, during the changes are shown in
R
B
=
R
C
=
100
5
2
i
A
e
i
2.5
1
0
0
−2.5
−1
−5
−2
0
1
2
3
4
5
6
7
8
0
1
2
3
4
5
6
7
8
Time [s]
Time [s]
(a) Filter inductor current
i
A
(b) Tracking error between
i
a
and
i
ref
Figure 6.16
Transient responses of the inverter when the local load was changed
























































Search WWH ::

Custom Search