Environmental Engineering Reference
In-Depth Information
−10
−20
−30
−40
−50
0
original
reduced
−45
−90
10
2
10
3
10
4
10
5
Frequency (rad/sec)
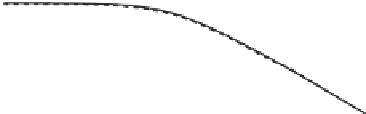
Figure 5.6
Bode plots of the original and reduced controllers
for
f
=
50 Hz and the processing delay is realised as
−
10000
20000
W
d
=
1
−
1
for
f
s
=
6 after some
trial-and-error. Using the MATLAB
R
hinfsyn
algorithm, the
H
∞
controller
C
which nearly
minimises the
H
∞
norm of the transfer matrix from ˜
5 kHz. The weighting parameters are chosen to be
ξ
=
24 and
μ
=
1
.
w
to
z
is obtained as
10
4
)(
s
2
10
8
)
864
.
6214(
s
+
+
9189
s
+
4
.
04
×
C
(
s
)
=
10
8
)
.
(
s
+
1
.
118
×
10
4
)(
s
+
2550)(
s
2
+
9047
s
+
4
.
198
×
The resulting
γ
=
T
ba
∞
is 0
.
8198 and
γ
0
=
T
e
w
∞
is 1
.
2083. The controller can be
reduced as
10
4
)
864
.
6214(
s
+
C
(
s
)
=
(
s
+
1
.
118
×
10
4
)(
s
+
2550)
without causing noticeable performance degradation, after cancelling the poles and zeros that
are close to each other. The Bode plots of the original and reduced controllers in the continuous
time domain are shown in Figure 5.6 for comparison. This leads to
T
ba
∞
=
0
.
815 and
T
e
w
∞
=
1
.
2030, which still maintains the system stability.
5.4 Experimental Results
5.4.1 Steady-state Performance in the Stand-alone Mode
Experiments were carried out in both stand-alone and grid-connected modes. In the stand-
alone mode, the experiments were carried out for a balanced resistive load
R
A
=
R
B
=
R
C
=
12
, a non-linear three-phase uncontrolled rectifier loaded with an LC filter
L
=
150
μ
H,
C
=
1000
μ
F and a resistor
R
=
20
, and an unbalanced linear load with
R
A
=
R
C
=
12















































Search WWH ::

Custom Search