Environmental Engineering Reference
In-Depth Information
~
a
b
v
1
ξ
~
~
W
v
2
μ
W
e
w
+
~
P
+
i
o
u
C
C
= [
C
1
C
2
]
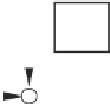
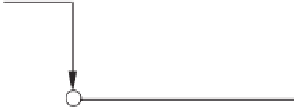
Formulation of the
H
∞
control problem
Figure 4.3
difficult to stabilise (a stabilising compensator may not exist, or it may need an unreasonably
high bandwidth).
In order to find a controller
C
, a standard
H
∞
problem is formulated as shown in
]
T
Figure 4.3, with ˜
w
=
v
1
v
2
w
and
[
z
y
P
˜
u
=
,
u
=
C
y
.
The nonzero parameter
ξ
is introduced to offer more freedom in the design process. The
small positive parameter
μ
is introduced to satisfy a rank condition needed to make the
A
u
D
u
is a weighting function whose value at infinity,
B
u
H
∞
problem solvable and
W
u
=
C
u
0, is also needed to meet a rank condition. The problem formulated here is a
slight improvement over the one in (Weiss and Hafele 1999), where
W
u
was a constant. The
fact that
W
u
is a frequency-dependent high-pass filter has the effect of reducing the controller
gains at high frequencies.
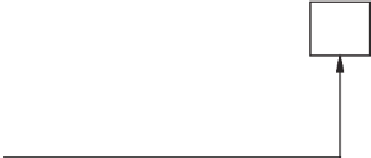
According to (Weiss and Hafele 1999), the closed-loop system in Figure 4.2 is exponentially
stable if the finite-dimensional closed-loop system shown in Figure 4.3 is stable and its transfer
function from
a
to
b
, denoted
T
ba
, satisfies
D
u
=
W
u
(
∞
)
=
1. The intuitive explanation for this is
that, in the control system of Figure 4.2, a delay line is connected from the output
b
to the input
a
appearing in Figure 4.3. To make this interconnected system stable, it is sufficient to make
the gain from
a
to
b
less than 1 at all frequencies according to the small gain theorem (Zhou
et al.
1996). Thus, the controller
C
needs to be designed so that the above two conditions are
satisfied. Moreover, in order to obtain a small steady-state error, it is necessary to minimise
γ
0
T
ba
∞
<
, where
γ
0
=
T
e
w
∞
,
γ
=
T
ba
∞
<
1, according to (Weiss and Hafele 1999).
1
−
γ
-analysis and synthesis toolbox from MATLAB
R
(the routine
hinfsyn
), a
controller
C
which nearly minimises the
H
∞
-norm of the transfer matrix from
Using the
μ
w
˜
to
z
,






























Search WWH ::

Custom Search