Environmental Engineering Reference
In-Depth Information
~
b
~
~
a
W
ξ
v
μ
w
e
+
P
~
C
u
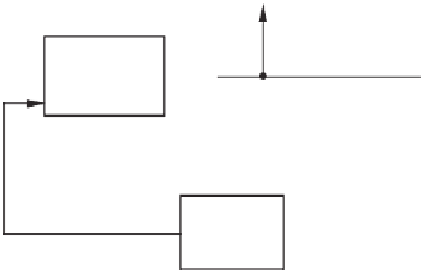
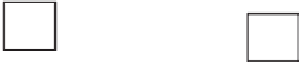
Formulation of the
H
∞
control problem
Figure 3.4
where
P
is the generalised plant and
C
is the controller to be designed. The generalised plant
P
consists of the original plant
P
together with the low-pass filter
W
and weighting parameters
ξ
and
μ
. The additional parameters
ξ
and
μ
are added to provide more freedom in design and
γ
0
to minimise
, where
γ
0
=
T
e
w
∞
,
γ
=
T
ba
∞
, while keeping
γ<
1.
1
−
γ
Assume that
W
is realised as
A
w
−
ω
c
B
w
ω
c
=
=
.
W
(3.7)
C
w
0
1
0
From Figure 3.4, the following equations can be obtained:
A B
1
B
2
C
1
D
1
D
2
u
y
=
e
+
ξv
=
ξv
+
⎡
⎣
⎤
A
(3.8)
v
u
0
B
1
B
2
⎦
,
=
C
1
ξ
D
1
D
2
=
+
ξv
z
1
W
(
e
)
⎡
⎣
⎤
A
w
A
v
u
B
w
0
B
1
B
2
⎦
=
(3.9)
C
w
0
C
1
ξ
D
1
D
2
⎡
⎤
⎡
⎤
A
0
0
B
1
B
2
v
u
⎣
⎦
⎣
⎦
,
=
B
w
C
1
A
w
B
w
ξ
B
w
D
1
B
w
D
2
0
C
w
0
0
0
z
2
=
μ
u
.
(3.10)










































































Search WWH ::

Custom Search