Chemistry Reference
In-Depth Information
x
1
.t
C
1/
D
.1
a
1
/x
1
.t/
C
a
1
R
1
..N
1/x
2
.t//;
x
2
.t
C
1/
D
.1
a
2
/x
2
.t/
C
a
2
R
2
.x
1
.t/
C
.N
2/x
2
.t//;
with 0<a
1
;a
2
1. From the expression of the best response R
k
.Q
k
/ of firm k in
Example 4.4, we obtain
x
1
.t
C
1/
D
.1
a
1
/x
1
.t/
C
a
1
min
LN
.N
1/x
2
;L
;
2d
1
x
2
.t
C
1/
D
.1
a
2
/x
2
.t/
C
a
2
min
LN
x
1
.t/
.N
2/x
2
.t/
;L
:
2d
2
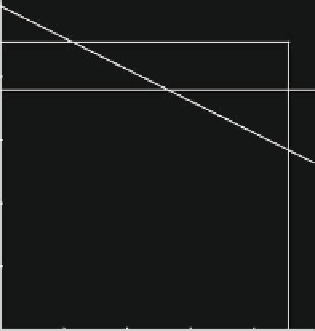
The presence of capacity constraints makes the resulting dynamical system piece-
wise differentiable. The phase space
D D
Œ0;L
Œ0;L can be divided into different
.i /
in Fig. 4.7, inside which the dynamical system is differ-
entiable. These regions are separated by lines (or borders) of non-differentiability
b
1
and b
2
,whereb
1
and b
2
are represented by the equations x
2
subregions, denoted by
D
NL
2
2d
1
.N 1/L
D
and
NL
2
2d
2
1
D
N 2
x
1
C
x
2
.N 2/L
respectively. Of course, some of these subregions may
be empty depending on the values of the model parameters. This subdivision is
important for the computation of the equilibria. In fact, interior equilibria are located
inside region
D
.1/
, where the dynamical system assumes the form
x
2
L
D
(3)
D
(4)
NL
2
−2
d
1
L
(
N
−1)
b
1
D
(2)
b
2
D
(1)
L
x
1
0
Fig. 4.7
Example 4.6; the discrete time model of an N-firm labor-managed oligopoly in the semi-
symmetric case. Linear price function and quadratic labor unit functions. The phase space structure
in the plane of outputs





Search WWH ::

Custom Search