Biomedical Engineering Reference
In-Depth Information
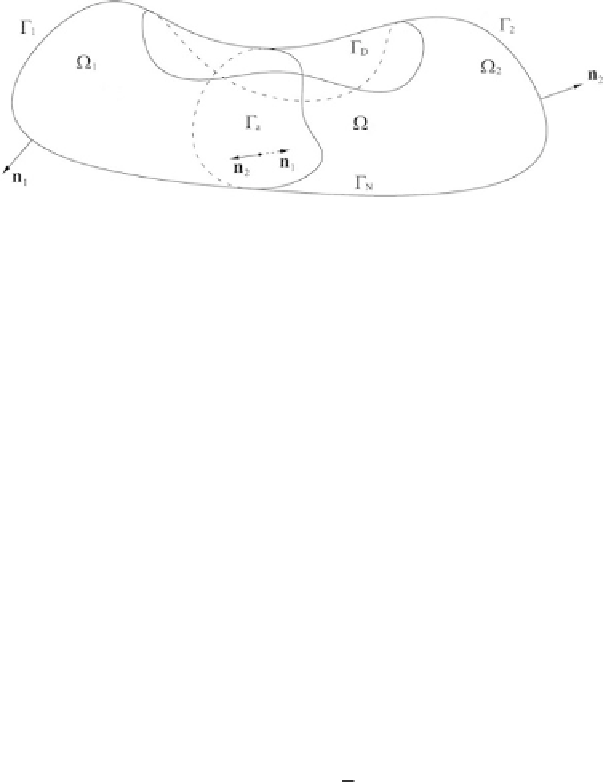
Fig. 9.1.
Partitioned domain for the definition of the abstract problem
internal boundary
Γ
a
over which no external distributed action (force) is assumed to
be applied (see Fig. 9.1), that is
R
(
u
)
|
Γ
a
=
−R
(
u
)
|
Γ
a
,
(9.4)
where the minus sign in the right-hand side appears because we have adopted as
positive orientation the direction given by the unit normal vector
n
1
,andwhere
Γ
a
Γ
a
correspond to the quantitites associated to the left and right partitions, re-
spectively, of the domain
and
Ω
in Fig. 9.1.
9.2.1 A partition with equal kinematics
Suppose now that we split the domain
Ω
into two parts,
Ω
1
and
Ω
2
,byasuffi-
ciently smooth (arbitrary) internal boundary
Γ
a
(see again Fig. 9.1) such that
Ω
=
Ω
1
∪
Ω
2
◦
. Moreover, instead of using kinematically admissible fields
u
satisfying
the continuity given by Eq. (9.3), we want to work with a pair of fields
(
u
1
,
u
2
)
(
u
i
defined in
that maintain the same regularity of the original problem on
each partition but are discontinuous over
Ω
i
,
i
=
1
,
2
)
Γ
a
. In other words we have
U
i
=
{
u
i
∈Q
|
Ω
i
;
u
i
|
Γ
D
i
=
u
i
},
i
=
1
,
2
,
(9.5)
where
Γ
D
i
is the part of
Γ
D
belonging to the boundary of
Ω
i
,
i
=
1
,
2, and where
Q
|
Ω
i
denotes the restriction of the kinematics
Q
to the subdomain
Ω
i
which is defined as
follows
z
|
Ω
i
,
z
Q
|
Ω
i
=
{
z
;
z
=
∈Q}
i
=
1
,
2
.
(9.6)
Due to the discontinuity over
Γ
a
, the variational formulation given by Eq. (9.1) is no
longer valid. Hence we need to reformulate the problem in order to find the same
solution characterized by this equation in the case of sufficiently regular data. In this
new situation we observe that the continuity condition
u
1
|
Γ
a
=
u
2
|
Γ
a
in the sense given by
T
Γ
a
(
Q
)
,
(9.7)
has to be obtained as
natural boundary condition
of the new variational problem.
The way to obtain this new extended variational formulation is very well known (see