Information Technology Reference
In-Depth Information
0
3
0
2
−2
−1
1
0
−4
−2
−1
−6
−2
−3
−3
−8
0
20
40
60
80
100
0
20
40
60
80
100
0
20
40
60
80
100
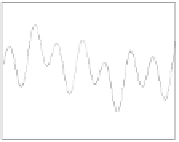
Frame number
Frame number
Frame number
(a)
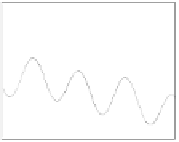
t
x
(b)
t
y
(c)
t
z
50
4
4
25
2
2
0
0
0
−25
−2
−2
−4
−50
−4
0
20
40
60
80
100
0
20
40
60
80
100
0
20
40
60
80
100
Frame number
Frame number
Frame number
(d) θ
x
(e) θ
y
(f) θ
z
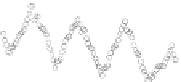
80
60
40
20
0
−20
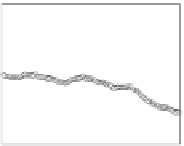
0
x (m)
20
5
10
15
20
−5
0
y (m)
(g) Saggital view
Fig. 23
Estimated camera positions (and their fitted curves) and 3-D structure (“o" - estimates
and “-" - fitted curves)
Hence, using both synthetic and real sequences, we have shown that the gait-
based method is more efficient than the basic STK tracker in all cases. Furthermore,
the gait based approach has allowed greater accuracy of structure and motion param-
eter recovery in the synthetic sequences, when we have had ground truth available
for comparison.
6
Conclusions and Future Work
We have developed a framework for efficient and robust ego-motion tracking using
a single camera attached to a pedestrian, i.e. without using any other indicators of
position, speed or inclination. An initial gait model is extracted from a fixed train-
ing period of two strides, using feature correspondences to estimate the ego-motion















































































































































































































Search WWH ::

Custom Search