Information Technology Reference
In-Depth Information
10
0
5
−1
−2
0
−3
−5
−4
−10
−5
0
10
20
30
40
50
0
10
20
30
40
50
Frame number
Frame number
(a)
t
z
(b)
θ
x
10
10
5
5
0
0
−5
−5
−10
−10
0
10
20
30
40
50
0
10
20
30
40
50
Frame number
Frame number
(c) θ
y
(d) θ
z
6
4
2
0
−2
−4
500
y (m)
0
x (m)
200
400
−200
−500
0
(e) Saggital view
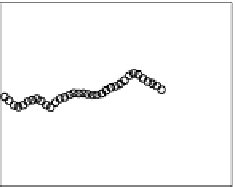
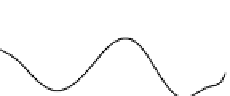
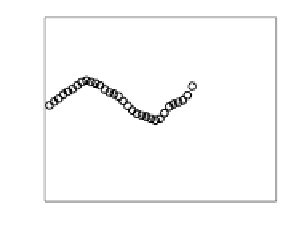
Fig. 19
Estimated camera positions (and their fitted curves) and 3-D structure for the “two
pedestrians" sequence. Note that the translations along with
x
-and
y
-axes are omitted here
due to small variations.
because they leave the field of view of the camera, and second because the oscil-
latory motion in this sequence is not large. As we do not have ground truth, Fig.
17 shows comparisons between the real (a) and (d), and the texture mapped (b) and
(e) scenes for two frames using the estimated motion parameters. The subtraction
images (c) and (f) show subjectively the accuracy of the approach.
In the second example, we investigate whether or not moving objects will af-
fect the performance of the proposed motion tracking algorithm. This is a common
case in real surveillance scenarios. Figs. 18-20 illustrate the results of the proposed

















































































































































Search WWH ::

Custom Search